




























Shenzhen Hpmont Technology Co., Ltd.
Chapter 7 Elevator Application Guidance
HD3N-L Series User Manual V1.0
- 53
-
7.3
Terminal Analogue Run Application
The elevator controller can calculate the motor present running direction (digital) and objective speed
(analogue) according to the elevator control logic and send them to HD3N-L.
HD3N-L control the motor to run according to the controller’s command and speed.
Example
A certain elevator with rated speed of 1.750m/s uses a controller in terminal analogue control (F00.05
= 1).
The elevator controller controls the brake and run contactor, sends the direction signal (digital) and
running speed (analogue) to HD3N-L.
AI set the speed (analogue).
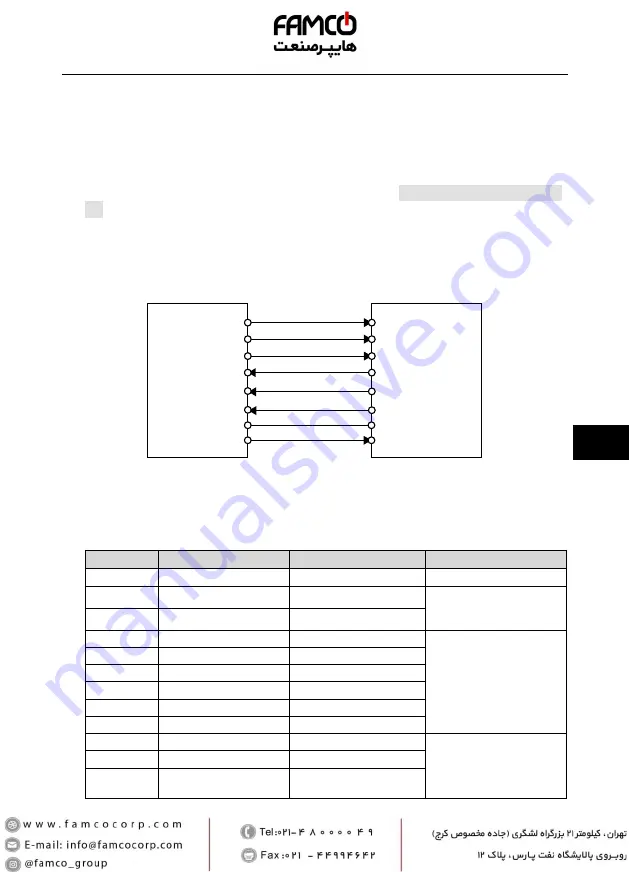
Control Part Connection
Figure 7-3 Terminal analogue running connection
Set Parameters
Refer to Table 7-1 for the general function. The terminal analogue special function setting content is
shown as Table 7-3.
Table 7-3 Terminal analogue run parameter
Ref. Code
Function
Value
Remark
F00.05
Operating mode
1
Terminal analogue control
F02.02
Start zero-speed hold time
0.5s
Adjust according to the
situation of run contactor and
brake at motor start and stop
F02.06
Stop zero-speed hold time
0.5s
F03.00
Acc. speed
0.700m/s
2
If the controller can not fast-
track speed command of the
elevator controller, increase the
values of F03.00 - F03.05
F03.01
Start Acc. jerk
0.350m/s
3
F03.02
End Acc. jerk
0.600m/s
3
F03.03
Dec. speed
0.700m/s
2
F03.04
Start Dec. jerk
0.600m/s
3
F03.05
End Dec. jerk
0.350m/s
3
F04.00
Setting curve
00000
Change according to the
analogue curve characteristics
F04.01
Line 1 Min. setting
0.0%
F04.02
Corresponding value of line 1
Min. setting
0.0%
Controller fault
Running
DI1
AI
DI2
DI3
COM
RLY1
DO1
Zero-speed running
DO2
HD3N-L
Elevator
controller
Controller enabled (EN)
Speed command
UP
DN
7







































































