



























Shenzhen Hpmont Technology Co., Ltd.
Chapter 6 Function Introduction
HD3N-L Series User Manual V1.0
- 35
-
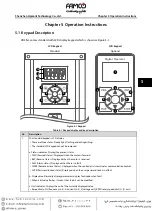
Ref. Code
Function Description
Setting Range [Default]
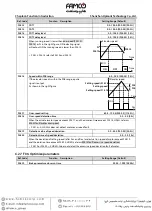
F07.20
AVR (Automatic Voltage Regulation) function
0 - 2 [1]
0: No action.
1: Enabled all the time.
2: Disabled in Dec. process.
•
The output voltage can be regulated to maintain constant via AVR. Thus, normally the AVR function
should be enabled, especially when the input voltage is higher than the rated voltage.
•
In Dec. process, if F07.20 = 0 or 2, the running current will be a little higher; While if F07.20 = 1, the motor
will decelerate steadily, and the current will be smaller.
F07.21
Motor oscillation-suppression mode
0,1 [0]
0: Depend on exciting component.
1: Depend on torque component.
F07.22
Motor oscillation-suppression coefficient
0 - 200 [100]
It is used to suppress the natural oscillation generated when the controller and the motor cooperate.
•
If the output current changes repeatedly during constant load operation, F07.22 can be set on the basis
of factory parameters to eliminate oscillation, and make the motor run smoothly.
6.2.9
F08: Motor Vector Control Speed-loop Parameters
Ref. Code
Function Description
Setting Range [Default]
F08.00
Low speed ASR KP
1 - 9999 [500]
F08.01
Low speed ASR KI
0 - 9999 [500]
F08.02
High speed ASR KP
1 - 9999 [500]
F08.03
High speed ASR KI
0 - 9999 [500]
F08.04
ASR PI swithcing frequency 1
0.00 - 50.00 [10.00Hz]
F08.05
ASR PI swithcing frequency 2
0.00 - 50.00 [15.00Hz]
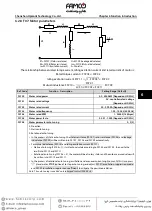
F08.00 - F08.05, F08.07 sets the PID parameters of the ASR (speed loop).
The structure of ASR is shown in figure:
•
When HD3N-L operates within 0 - F08.04, the PI parameters
of vector control are F08.00 and F08.01;
•
When HD3N-L operates above F08.05, the PI parameters of
vector control are F08.02 and F08.03;
•
When HD3N-L operates within F08.04 - F08.05, P is the linear
interpolation between F08.00 and F08.02, while I is the linear
interpolation between F08.01 and F08.03.
•
Increasing the ASR KP (F08.00, F08.02) can speed up the dynamic response of the system. But if KP is too
large, it is easy to produce oscillation.
•
Increasing the ASR KI (F08.01, F08.03) can speed up the dynamic response of the system. But if KP is too
large, it is easy to produce oscillation and overshoot.
•
F08.01/F08.03 = 0, the integral function is unused, the ASR works only as a proportional regulator.
•
Generally, adjust the KP firstly to the max. on condition that the system does not vibrate, then adjust the
KI to shorten the response time without overshoot.
•
To shorten dynamic response time during lowe frequency running, increase KP and KI.
Frequency feedback
Frequency command
Error
PID
Torque limit
Torque current setting
+
-
F08.02/
F08.03
F08.04
F08.05
F08.00/
F08.01
PI parameter
Frequency
0
6







































































