


























Chapter 6 Function Introduction
Shenzhen Hpmont Technology Co., Ltd.
- 42 -
HD3N-L Series User Manual V1.0
6.2.15
F16: Function-boost Parameters
Ref. Code
Function Description
Setting Range [Default]
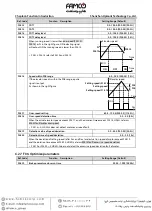
F16.00 Zero-speed running signal delay time
0.00 - 10.00 [0.30s]
Defines the delay time of the controller from zero-speed run status to zero-speed run signal output.
F16.01 Zero-speed signal delay time
0.00 - 10.00 [0.30s]
Defines the delay time of the controller from zero-speed status to zero-speed signal output.
F16.02 Current keep time after stop
0 - 9999 [0ms]
To eliminate the current noise of motor at stop, when the brake finished, the cut-off run signal will reduce
the current to zero after the time of F16.02.
F16.03 Fan control
0 - 2 [0]
Defines the fan control mode. If there is overheat protection, the fan will run all the time.
0: Auto stop.
•
The fan runs all the time when the controller is in run status. After the controller stops for the time of
F16.04, the fan continues running if overheat protection is activated.
1: Immediately stop.
•
The fan runs all the time when the controller is in running status, but stops when the controller stops.
2: Run when power on.
•
The fan runs continuously after the controller is switched on.
F16.04 Fan control delay time
0.0 - 600.0 [30.0s]
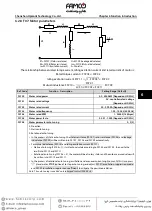
F16.05 Brake unit action voltage
630 - 750 [720V]
Note: The braking action enables only in run status of the controller.
F16.06 Contactor fault detection time
0.1 - 10.0 [2.0s]
F16.07 Multi-speed inspection
0 - 7 [0]
When the DI terminals are not enough, the MS1 - MS3 can achieve inspection run.
•
DI terminal = INS (No. 7 function), only need set F16.07 = 0 to enter terminal inspection run.
•
DI terminal ≠ INS (No. 7 function), the inspection run can be achieved via the MS1 - MS3.
•
Value of MS1 - MS3 = F16.07, enter MS inspection run at MS run speed (F05.00 - F05.07).
Note: When MS run speed (F05.00 - F05.07) exceeds 0.630m/s, run at 0.630m/s.
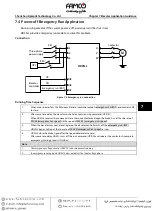
F16.08 Zero-speed threshold
0.001 - 0.010 [0.003m/s]
When the present run speed ≤ F16.08, the system run speed will be considered as 0. After zero-speed delay
signal, the zero-speed signal will output.
F16.09 Selection at motor overheat fault
0,1 [0]
0: When detect that the motor is overheated, alarm E0020 fault (motor overheat) after motor stops.
1: When detect that the motor is overheated, alarm E0020 fault (motor overheat) at once.
F16.12 Delay time of run output signal
0.00 - 1.00 [0.00s]
Note: F16.12 is used to delay the controller running signal (output = No. 2 function)
so as to control the elevator
controller to open the brake.
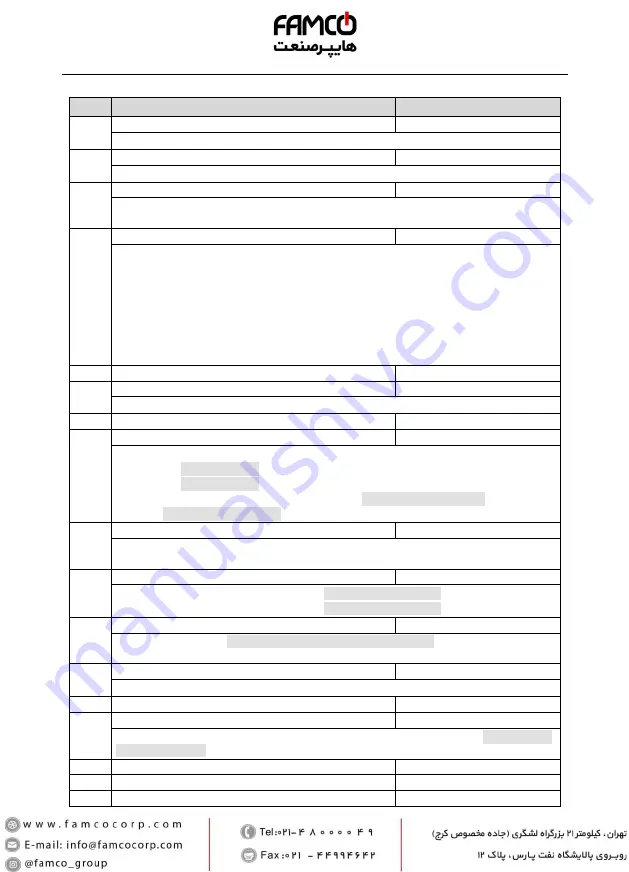
F16.13 Emergency run direction auto-determine enable
0,1 [0]
0: Not enable. 1: Determine the running direction according to the current.
F16.14 Running Min. current limit
0 - 100 (F07.11) [20%]
F16.15 Running Min. detection time
0.0 - 5.0 [0.0s]
When the elevator run current < F16.14 and duration exceeds F16.05, the controller alarms E0025 fault (too
small running current).
F16.17 DC braking current at stop
0 - 150 [100%]
F16.18 Starting frequency of DC braking current at stop
0.20 - 10.00 [0.50Hz]
F16.19 Brake release frequency
0.00 - 10.00 [0.00Hz]







































































