




















INSTRUCTION, USE
AND MAINTENANCE MANUAL
GB
Page 25 of 168
7522-M001-14_P
GG40256.11SL - GG40256.11ST - GG40256.15
GG40256T.15 - GG40256A.15 - GG40256D.15
GG40256TD.15 - GG40256.15SL - GG60360.15
GG60360T.15 - GG60360A.15 - GG60360D.15 - GG60360TD.15
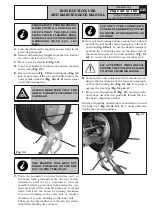
Fig. 20
Locking with extensions
Whenever the rim exceeds the 42” in the locking point,
use the appropriate extensions supplied with the tyre-
changer. To avoid damages or scratches on light alloy
rims, the special jaws supplied with the tyre changer
as an optional should be used.
AFTER COMPLETION OF TYRE
MOUNT/DEMOUNT OPERATIONS
DO NOT LEAVE THE WHEEL
CLAMPED ON THE SELF-CEN-
TRING CHUCK AND NEVER LEAVE
IT UNATTENDED ANYWAY.
DURING ALL TYRES MOUNTING AND DE-
MOUNTING OPERATIONS, THE SELF-CEN-
TRING CHUCK ROTATION SPEED CAN BE DOU-
BLED BY ROTATING THE SELECTOR (FIG. 14
REF. C1).
IN CASE OF GG40256D.15, GG40256TD.15,
G G 4 0 2 5 6 . 1 1 S L ( V A R G N A V 4 3 A D ) ,
GG40256.15SL (MODEL WITH INVERTER
VERSION) (VARGNAV43AD) GG60360D.15
AND GG60360TD.15 MODELS, USING THE
SELECTOR (FIG. 14 REF. C2), SELF-CENTRING
CHUCK ROTATION SPEED CAN BE ADJUSTED
RESPECTIVELY AT 1, 6 OR 12 RPM. LOW
SPEED IS RECOMMENDED FOR WHEELS WITH
GREAT DIAMETER AND WEIGHT. 1 RPM IS THE
CORRECT SPEED VALUE FOR THE GROOVE OF
TRUCK TYRES. LUBRICATE THE TYRE BEADS
CAREFULLY TO PROTECT THEM AGAINST
ANY DAMAGE AND SIMPLIFY MOUNTING AND
DEMOUNTING OPERATIONS.
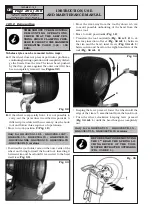
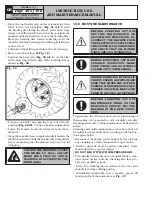
12.5 Functioning of tool holder arm
During the working phases, the tool holder arm can
maintain two firm positions, that is:
1) “Working” position;
2) “Out of work” position.
In “working” position (
Fig. 21 ref. 1
) the tool holder
arm is lowered towards the mandrel and from this
position it executes the various tyre bead breaking,
demounting and mounting operations.
Fig. 21
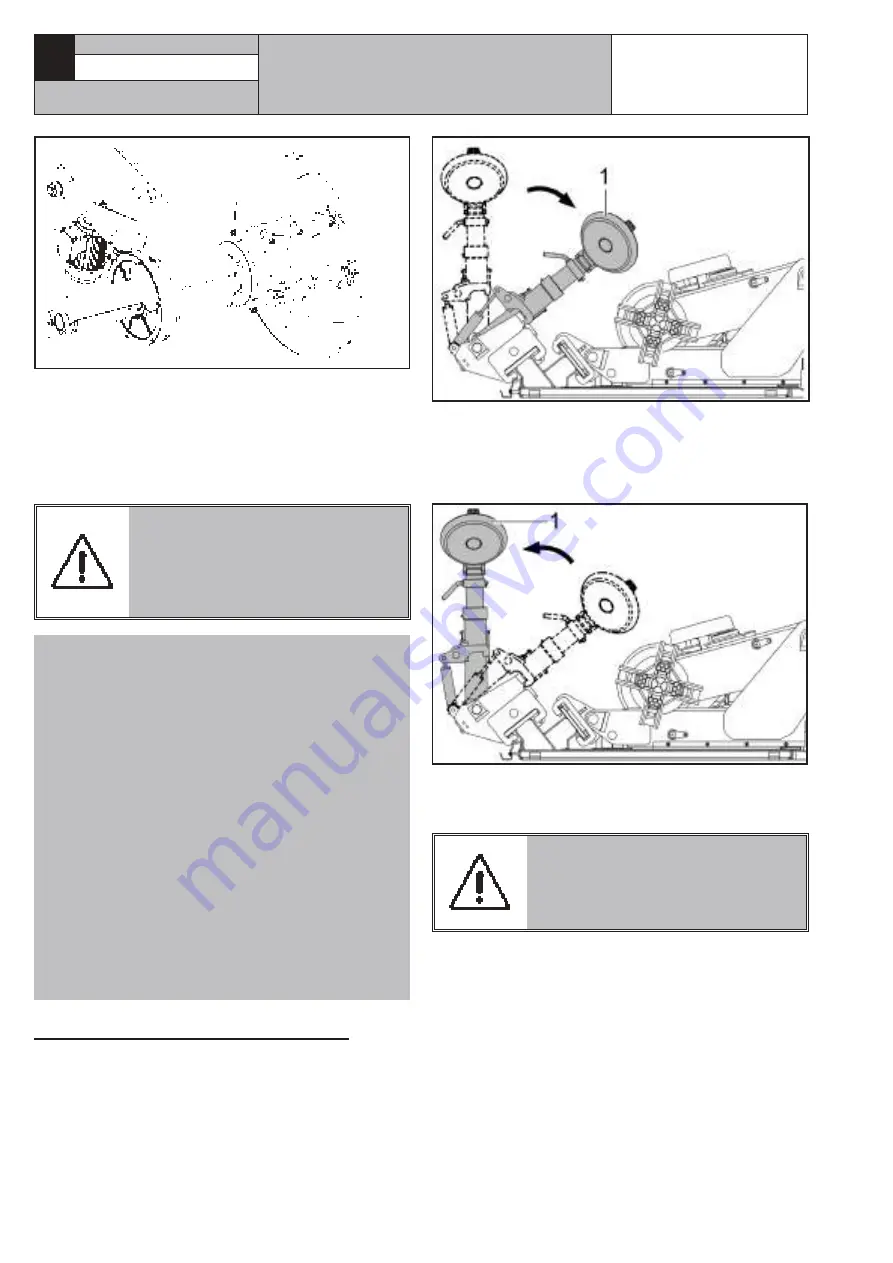
In “out of work” position (
Fig. 22 ref. 1
) the tool hol-
der arm is in vertical position and has to be brought
in this position every time it is not in use and in order
to be shifted from one tyre side to another, during the
different working phases.
Fig. 22
The tool holder arm moves from “out of work” position
to “working position” manually or through hydraulic
cylinder.
IN WORKING POSITION, THE SA-
FETY JACKS (FIG. 1, 2, 3, 4, 5, 6
AND 7 REF. 8) MUST BE HOOKED
TO THE TOOL CARRIAGE (FIG. 1,
2, 3, 4, 5, 6 AND 7 REF. 13).
On the contrary, in order to reach “out of work” po-
sition from “working position”, the tool holder arm
moves through the manipulator control operating the
cylinder (
Fig. 1, 3, 4, 5, 6 and 7 ref. 21
) in case
of
GG40256.11SL, GG40256.15, GG40256T.15,
GG40256A.15, GG40256D.15, GG40256TD.15,
GG40256.15SL or GG60360.15, GG60360T.15,
GG60360A.15, GG60360D.15, GG60360TD.15
, or
it moves after the provided pedal (
Fig. 2 ref. 21
) is
pushed, in case of
GG40256.11ST
.
The tool holder arm moves from “out of work” position
to “working position” manually or through hydraulic
cylinder.