





























www.fastech.co.kr
Other Operation Functions
48
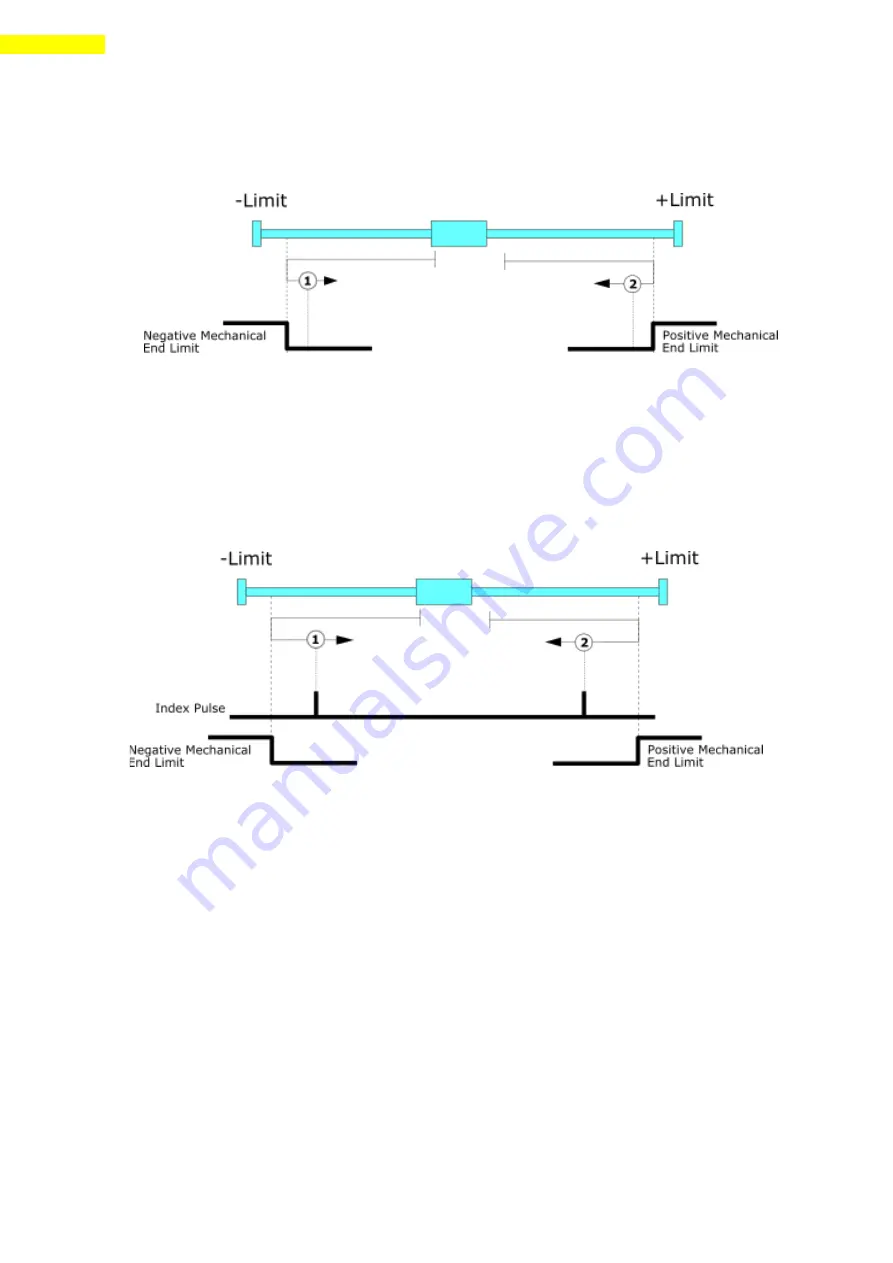
7) Torque Origin (In case of Org Method=6)
During movement motion by ‘Org Speed’ value, motion stop when detecting the force as much as
‘Org Torque Ratio’ by contact with a particular object, and finished origin return after moving to
opposite origin return direction of a certain position.
This method can be used in a system that origin sensor or Limit sensor is not supported.
①
: In case of Org Dir is 1(CCW)
②
: In case of Org Dir is 0(CW)
8) Torque Z Phase(In case of Org Method=7)
During movement motion by ‘Org Speed’ value, motion stop when detecting the force as much as
‘Org Torque Ratio’ by contact with a particular object, finished origin return when detecting the
Z-phase during the moving to opposite origin return direction.
This method can be used in a system that origin sensor or Limit sensor is not supported.
①
: In case of Org Dir is 1(CCW)
②
: In case of Org Dir is 0(CW)
(2) Origin return Procedure
Origin return is executed according to the following procedure.
①
Set parameters required to origin return.
②
If the Servo is OFF, (reset an alarm when it occurs) input Servo ON on control or send
a communication program so that the Servo can be ON.
Start origin return operation by inputting ON signal of
「
Origin Search
」
on control or
inputting the command of the communication program.
(3) Interruption of Origin Return
When the machine is under origin return, it stops according to 'Stop' or 'E-stop' command.
the machine’s origin is not edited and the origin return is canceled.
Summary of Contents for Ezi-Servo II Plus-E 20 Series
Page 1: ... Rev 04 User Manual Text ...
Page 10: ...www fastech co kr Specifications size of the Motor 10 ...
Page 11: ...www fastech co kr 11 Specifications size of the Motor 3 2 Motor Size ...
Page 12: ...www fastech co kr Specifications size of the Motor 12 ...
Page 18: ...www fastech co kr Configuration 18 2 86 mm motor drive ...
Page 20: ...www fastech co kr Configuration 20 2 86 mm motor drive ...
Page 74: ...www fastech co kr Appendix 74 12 3 Brake Installed Motor Specifications and Size ...
Page 76: ...www fastech co kr Appendix 76 2 Gearbox for 56mm Motor Specifications ...
Page 77: ...www fastech co kr 3 Gearbox for 60mm Motor Specifications ...
Page 78: ...www fastech co kr Appendix 78 4 Gearbox for 86mm Motor Specifications ...
Page 79: ...www fastech co kr 5 42mm motor size with Gearbox ...
Page 80: ...www fastech co kr Appendix 80 6 56mm motor size with Gearbox ...
Page 81: ...www fastech co kr 7 60mm motor size with Gearbox ...
Page 82: ...www fastech co kr Appendix 82 8 86mm motor size with Gearbox ...







































































