





























4. CiA402 Drive Profile
Push Motion (Stop Mode)
The Push Motion (Stop Mode) of Ezi-SERVOII EtherCAT TO moves motor to the Target Position while
maintaining the specified torque, and stops and finishes Push Motion when a work is detected. The
motor torque during the Push Motion can be set through Push ratio of Object 201Ah: Push Mode. Pull
back distance of Object 201Ah: Push Mode allows to set the distance to pull back the motor when the
Push Motion is finished.
To do Push Motion (Stop Mode) to the new Target Position, Set Push Mode (Bit 12) and Reset Non-stop
Push (Bit 13) before change New Set-Point (Bit 4) of Control word from RESET to SET. Once controller
receives this request, Set-Point Acknowledge (Bit 12) and Push State (Bit 8) of Status word become SET
and the Push Motion is executed. Target position refers to Target position (607Ah) and Position value
can be absolute coordinates or relative coordinates by Control word of Relative (Bit 6).
In the Push Motion (Stop Mode), the Push Motion is finished when a work is detected or the target
position is reached.
t
t
t
t
t
Actual Speed
Control Word – bit 4
New Set-Point
Target Position
Status Word – bit 12
Set-Point Acknowledge
Status Word – bit 10
Target Reached
t
Control Word – bit 12
Push Mode
t
Status Word – bit 14
Push Detected
t
Status Word – bit 8
Push State
1
2
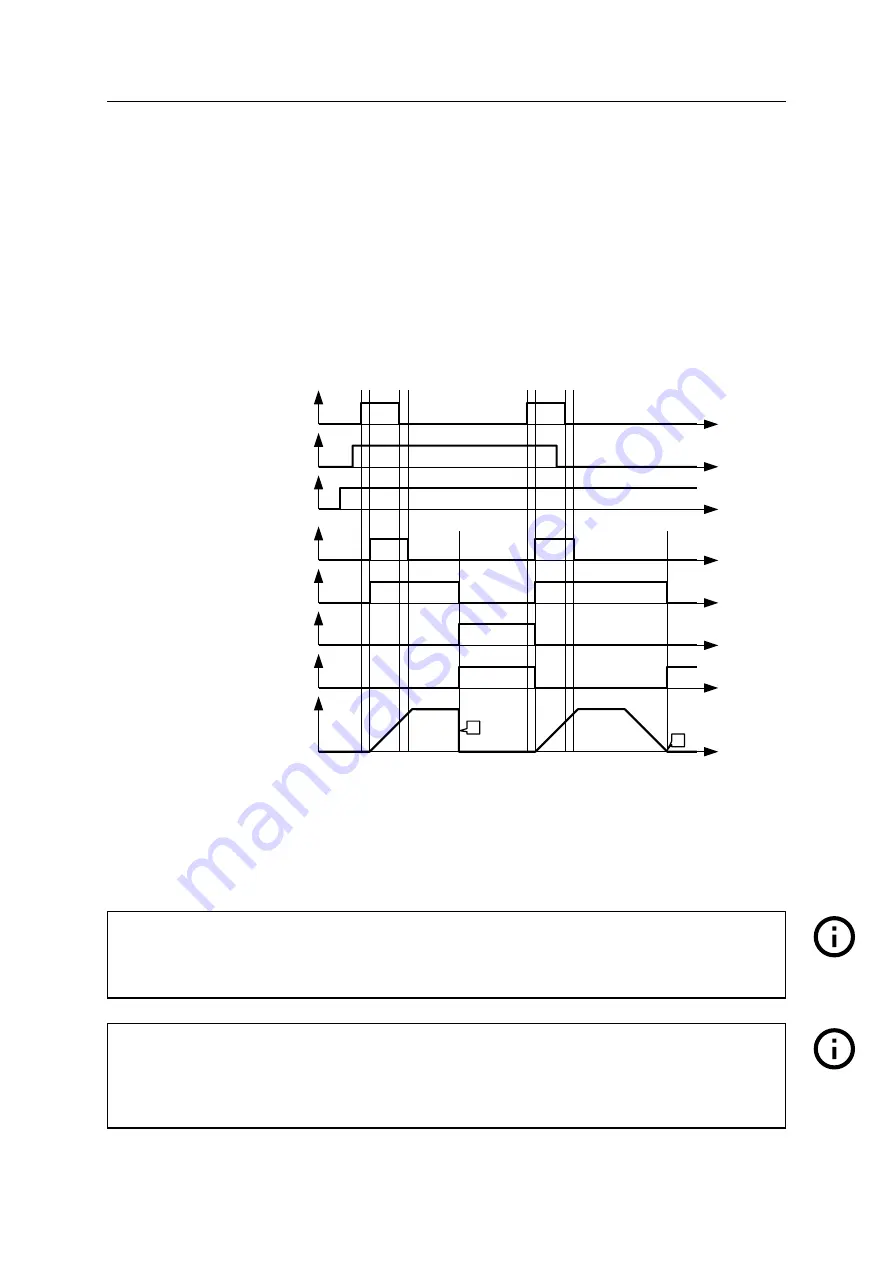
Figure 4.7: Push Motion (Stop Mode)
1. A work was detected before reaching the target position. The detection status can be judged by
Push Detected (Bit 14) of Status word. controller do quick-stop when a work is detected.
2. The target position has been reached without detecting a work.
Information
If the motor speed is fast or the value of Push ratio is low, it may be determined that a work is
detected even if a work is not detected actually. In this case, lower the motor speed or increase the
Push ratio.
Information
If the motor is moving with the previous move command, the push command cannot be executed.
Please execute the command after the motor has completely stopped.
The ’Input next target position’ and ’Target position override’ commands are not allowed during the
Push Motion.
Rev.37
FASTECH Co., Ltd.
49
Summary of Contents for Ezi-SERVOII EtherCAT TO
Page 10: ...Chapter 1 Product Specification Rev 37 FASTECH Co Ltd 10...
Page 12: ...1 Product Specification 1 2 Product Dimension Figure 1 2 Dimensions Rev 37 FASTECH Co Ltd 12...
Page 15: ...Chapter 2 Installation Rev 37 FASTECH Co Ltd 15...
Page 29: ...Chapter 3 EtherCAT Communication Rev 37 FASTECH Co Ltd 29...
Page 35: ...Chapter 4 CiA402 Drive Profile Rev 37 FASTECH Co Ltd 35...
Page 67: ...Chapter 5 Operation Rev 37 FASTECH Co Ltd 67...
Page 71: ...Chapter 6 EtherCAT Object Dictionary Rev 37 FASTECH Co Ltd 71...







































































