




























2nd edition, 31-03-2020
7000.05061, 2nd edition, 31-03-2020
7000.05061
Description of functions
27
5.1.1.3
BL motors without Hall sensors (BRC motors)
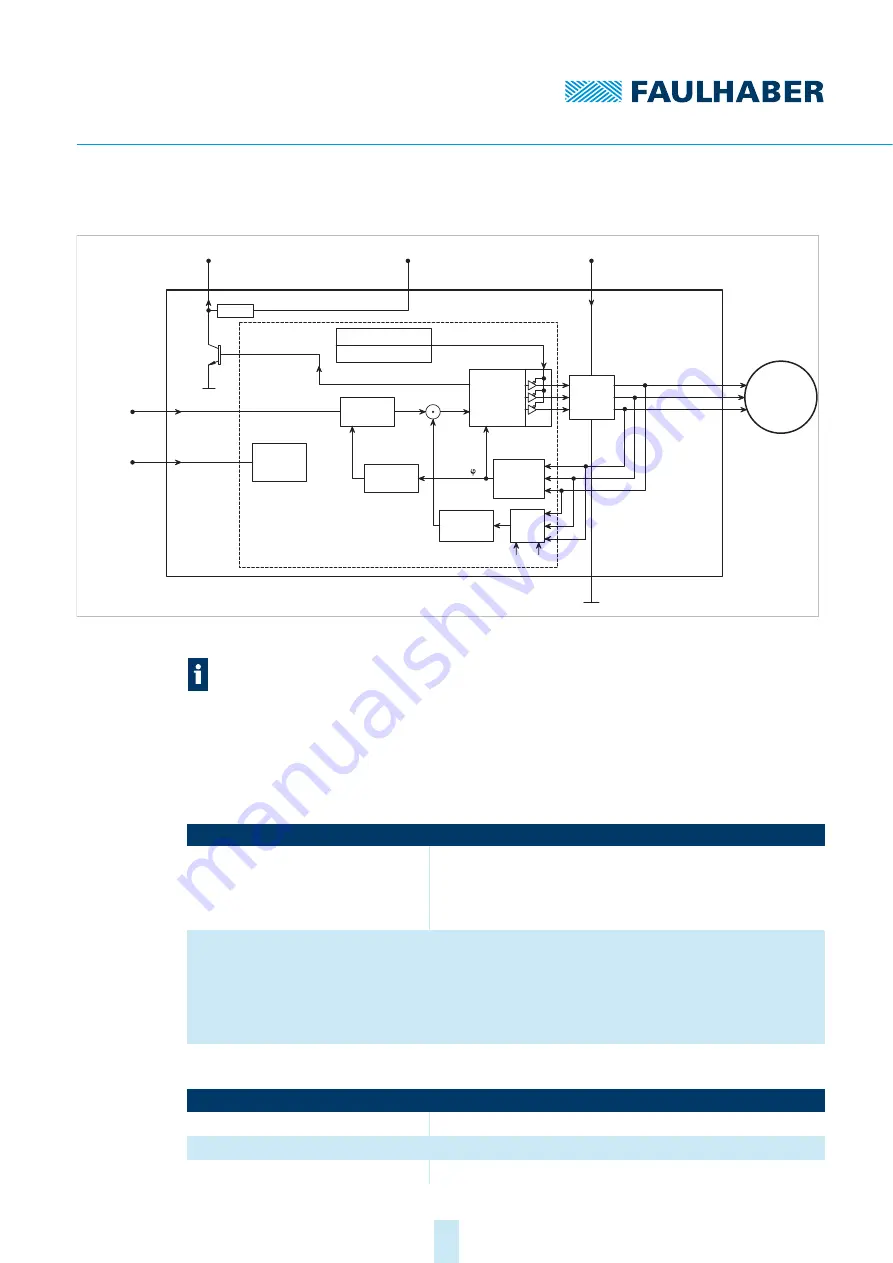
Fig. 14: Block diagram of a BL motor without Hall sensors
BRC motors do not have any Hall sensors. The commutation signal is generated using the
back-EMF (back-induced voltage). In sensorless operation, the actual value for speed is
determined using the time interval between the commutation switching points.
Sensorless operation differs from operation with sensors with regard to the following
points:
The following basic parameters are preset in this configuration:
DIR
Rotational direction input
Evaluation
rotational
direction
U
nsoll
n
soll
0 – 10 V DC
Setpoint input
Digital output
FG
22 k
Ω
Electronics supply
U
p
Motor supply
U
mot
GND
MOSFET
Power
output
stage
Protection function:
Overtemperature
Microcontroller
PI velocity
controller
Speed
calculation
Armature
position
calculation
(t)
I²t current
limitation
U
a
3 Phase
PWM
block
commutator
BL-Motor
Phase A
Phase B
Phase C
I
ist
RM
Motor
model
k
E
Depending on the motor, stable speed control is possible in this configuration from
approx. 1 000 min
-1
.
Designation
Explanation
Motor start
The motor start uses algorithms which also enable the motor to start
from stationary when the position of the rotor is unknown. As a
result, when the motor starts, it can briefly (less than half a revolu-
tion) rotate in the wrong direction. The motor start time is greater
compared to operation with Hall sensors.
Operation with low load
With low load and low speed values, the speed is set by specifying a
rotating field. In this case, changing the speed set value specification
or changing the load causes a transition between rotating field mode
and speed-controlled mode. In order to ensure constant speeds even
in the case of changes in load, the operating range should be outside
of this transition range. A suitable operating point can usually be
found by reducing the motor power supply.
Designation
Explanation
Set value specification
Analogue
Digital output
Frequency output (cannot be changed)
Operating mode
Speed-controlled







































































