





























TXT
Discovery Set
ROBOTICS
23
Mobile Robots - The Next Challenge
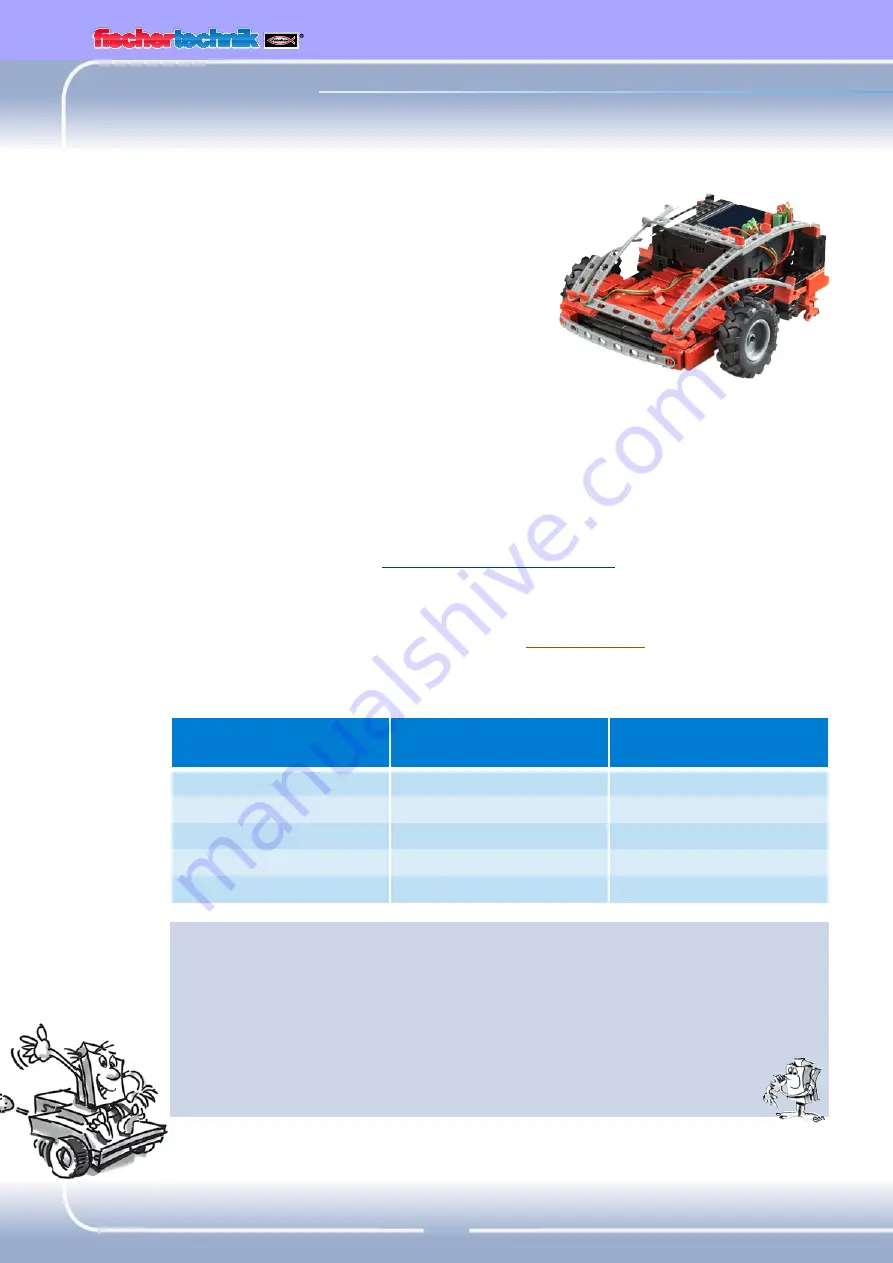
Mobile Robot
With this model, we want to find out
together how you can control a moving
robot. How do you get it to move, how does
the steering work and can you perhaps improve its
precision? We will answer these questions with the help of the tasks in
this chapter.
But first of course, you have to put the robot together. As always, you
will find the description in the assembly instructions.
Take your time putting it together. Look closely at the drawings in the
assembly instructions and the wiring as well. If you do not connect
the components to the
ROBOTICS TXT Controller
as described in the
assembly instructions, the robot may not behave like you expect.
After assembly, check all components connected to the ROBOTICS TXT
Controller with the ROBO Pro software
interface test
. When the motors
turn counterclockwise, the robot should move forwards.
Direction of motion
Direction of rotation,
motor 1
Direction of rotation,
motor 2
Forwards
Left
Left
Backwards
Right
Right
Left
Left
Right
Right
Right
Left
Stop
Stop
Stop
Task 1: Simply Straight Ahead
Have the robot move straight ahead for 3 seconds (not on a table,
danger of falling off!) and then straight back for 3 seconds.
Did the robot really come back to its starting point?
Repeat the program several times and observe if the robot real-
ly moves precisely straight ahead and back.
Summary of Contents for ROBOTICS ADVANCED
Page 1: ......







































































