





























User Manual X8400 sc
29
6 RADIOMETRIC MEASUREMENT WITH THE X8400sc
6.1 Non Uniformity Correction
General
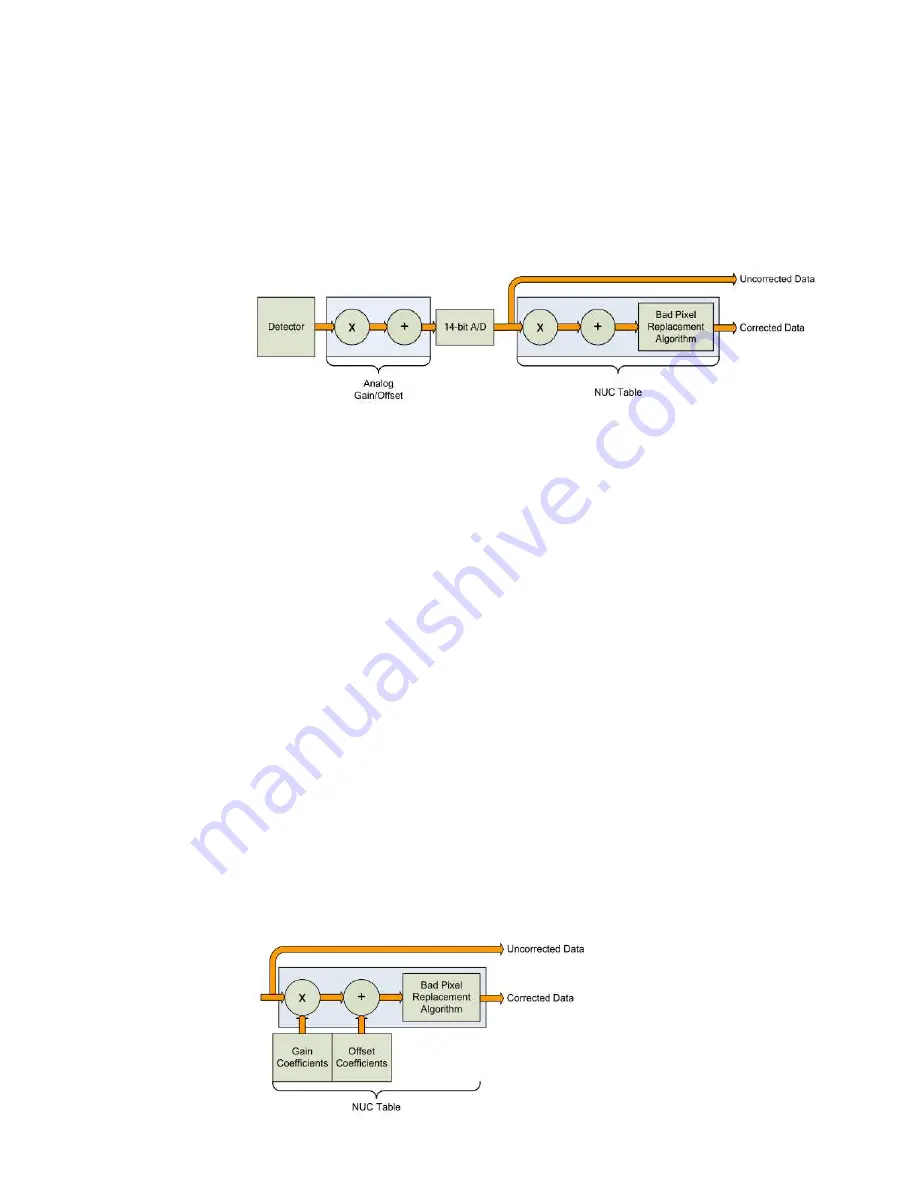
Non-Uniformity Correction (NUC) refers to the process by which the camera electronics
correct for the differences in the pixel-to-pixel response of each individual pixel in the detector
array. The camera can create (or allow for the user to load) a Non-Uniformity Correction
(NUC) table which consists of a unique gain and offset coefficients and a bad pixel indicator
for each pixel. The table is then applied in the digital processing pipeline as shown in Figure
4. The result is corrected data where each pixel responds consistently across the detector
input range creating a uniform image.
Figure 4: Digital Process showing application of NUC tables
To create the NUC table, the camera images either one or two uniform temperature sources.
The source is an external source provided by the user. The source should be uniform and
large enough to overfill the camera field-of-view (FOV). By analyzing the pixel data from
these constant sources, the non-uniformity of the pixels can be determined and corrected.
There are two types of processes which are used to create the NUC table: One-Point and
Two-Points.
6.1.1 CNUC™
General
CNUC is a proprietary calibration process. A camera calibrated with CNUC™ allows for
flexible integration time adjustments without the need to perform non-uniformity corrections.
Additionally, the CNUC™ calibration produces accurate measurement stability regardless of
camera exposure to ambient temperature variations.
A CNUC™ correction is valid for a specific optical configuration composed of a combination
of lens and spectral filers. CNUC™ corrections are generated by FLIR service offices where
advanced calibration benches are available. Contact your FLIR representative to proceed to
CNUC™ correction on new spectral filters or infrared lenses.
CNUC™ process generates a gain and offset map based upon camera internal parameters
and environmental probes.
6.1.2 Two-Point Correction Process
General
The Two-Point Correction Process builds a NUC table that contains individually computed
gain and offset coefficients for each pixel as seen in Figure 5. Two uniform sources are
required for this correction. One source at the low end and a second source at the upper end
of the usable detector input range.
Figure 5: Two Points Correction







































































