User Manual X8400 sc
31
6.4 Bad Pixel Replacement
General
Once the correction of non-uniformity has been calculated, the bad pixels can be detected
and replaced. The replacement is done by replacing the bad pixels by the median value of
the 8 neighboring pixels.
Note
There are three kinds of bad pixels:
•
Bad pixels relative to the gain of the non-uniformity correction. In this case the
system will consider a pixel as bad one if the gain coefficient from the non-uniformity
correction is lower or higher the predefined percentage. For instance if the threshold
is 25%, the system will determine pixel as bad if gain < 0.75 and gain > 1.25.
•
Bad pixels relative to the offset of the non-uniformity correction. In this case the
system will consider a pixel as a bad one if the offset coefficient from the NUC table
is lower or higher the predefined threshold. For instance if the threshold is 30% and if
the range of digitization is 16 384 DL, the system will determine pixel as bad if offset
< -4 915 DL and offset > 4 915 DL.
•
Bad pixels relative to its level of RMS noise. In this case the system will consider
pixel as bad if the RMS noise is lower or higher the predefined threshold. For
instance if the threshold is 3.5 and the mean and standard-deviation of the noise
image are respectively 5.0 and 1.0, the system will determine pixel as bad if RMS
noise > 8.5.
With the absolute threshold, the system considers a pixel as bad if its value is higher
than this threshold.
6.5 Frame Rate and Integration modes
General
Frame rate is the number of images taken by the camera per second. The Integration time is
the “exposure time”, the period of time the camera actually views the scene. Achievable
frame rates are based on camera settings, camera overhead, and integration settings. A brief
review of the processes that occur during a frame is needed to understand how to determine
maximum achievable frame rates.
There are two basic integration modes: Integrate Then Read (ITR) and Integrate While Read
(IWR). Integrate Then Read is the most basic behavior of the camera and shows the process
most clearly.
Note
•
A NUC update is recommended anytime an adjustment is made to either frame rate
or integration time, regardless of the integration mode.
6.5.1 Integrate Then Read
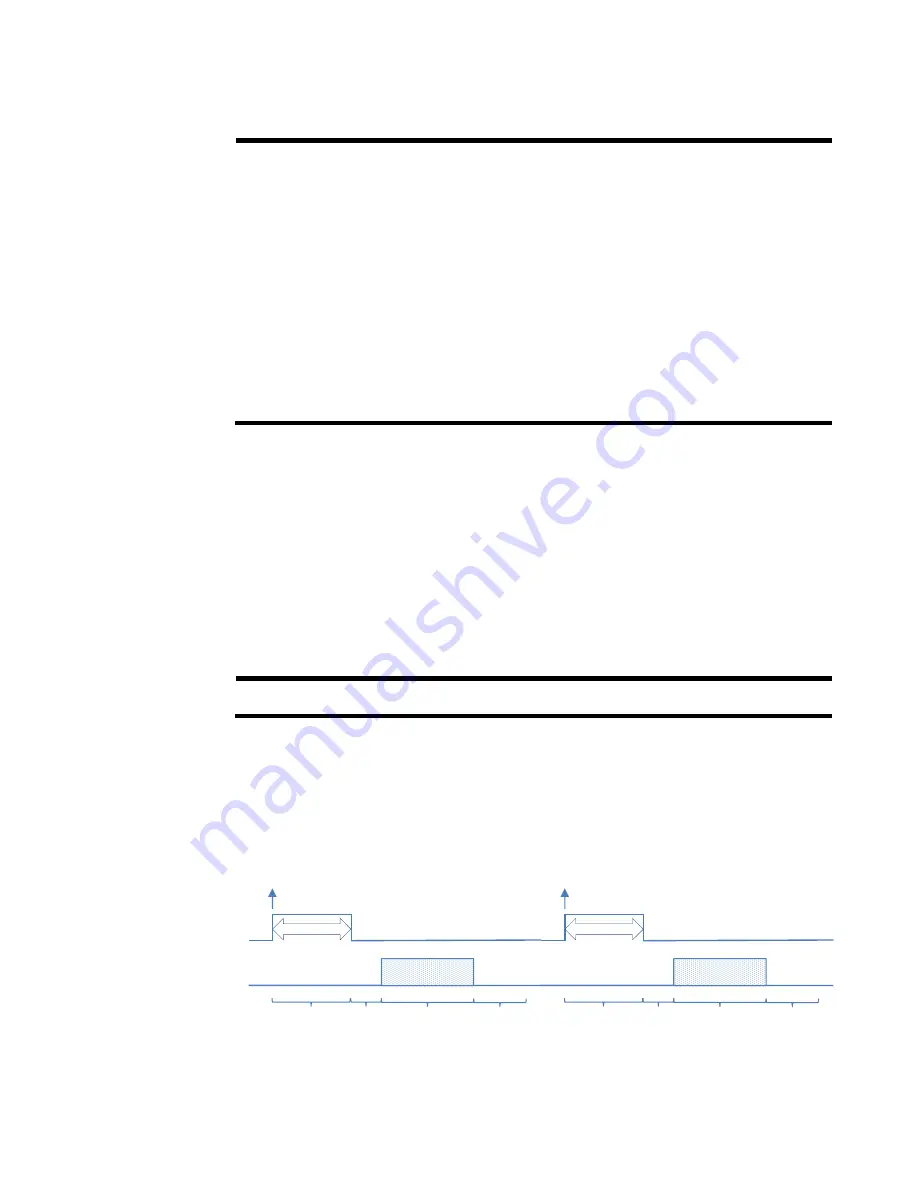
As seen in Figure 6, the frame generation process begins with a Frame Sync. The camera
then integrates the set amount of time, goes through a fixed dead time, transmits data, goes
through a second fixed dead time, and then is ready to start the process over again. Here you
see the camera first completes the integration process and then reads the data out, hence
the term Integrate Then Read
.
Figure 6: ITR Frame Generation Process
Integration
Data Read
Frame Sync
Integration Period
Dead Time
Data Width
Dead Time
Integration
Data Read
Frame Sync
Integration Period
Dead Time
Data Width
Dead Time