





LE D
F S-S
P D01
SPEED
2
OUT
IN
Magnetic
15
FS-CEV04 i-BUS
串行总线接收机连接说明
FS-CPD01
磁感应转速采集模块
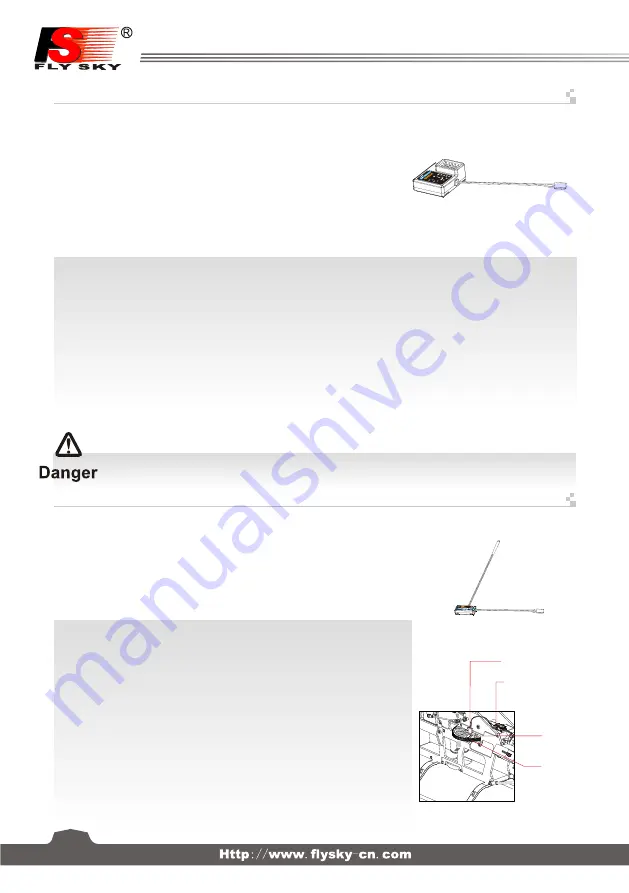
RPM telemetry (magnetic) module setup
传感器
Sensor
速度采集模块
Revolving
speed module
齿轮
Gear
磁铁
Magnet
串行总线接收机,
最多可串联
4
个模块,共
16
个通道;按键
K1-K4
分别对应
C1-C4,
用于对相应通道的设定;
操作说明:
1. FS-CEV04 i-BUS
接收机的“
IN
”端口对应接收机的“
OUT
”端口;
2. FS-CEV04 i-BUS
接收机的“
OUT
”端口,用于串接后级的
FS
-
CEV04
接收机,以串联的 方式使用。
3.
将此总线接收机插入接收机,打开己配对的发射机,接收机电源,
LED
点亮;
4.
操作发射机触控屏,选择接收机设定的主菜单,进入到舵机设定界面;
5.
选择需要扩展的通道,此时,总线接收机的
LED
熄灭;
6.
用对码线上的胶针,按下需要的,相应通道的按键,
LED
自动点亮,表示设定成功;
7.
插入舵机,检查设定是否成功;
8.
重复以上操作即可完成总线接收机
4
个通道的设定;
9.
当需要更多的通道扩展时,只需要在第一级总线接收机的“
OUT
”端口,串接新的总线接收机即可,设定的操作方法相同。
注意: 当总线接收机的负载过重,电流较大时,请将主接收机的电源分支出来并联接入,单独供电加大负载的能力,
否则可能会因电流过大,烧坏串联的线材。
操作使用说明:
1.
将所配的
3 PIN
插头,一端插入
速度采集模块
的“
OUT
”位置,另一端插入接收机的“
IN”
位置或
接另外的感应器的“
IN
”位置,如图
12
.
4
所示;
2.
如图
12.5
所示,将传感器放在磁铁的旁边,磁铁固定在需要测试的轴向转动的地方,如直升机的
齿 轮上面,传感器与磁铁相距两毫米以内,
磁铁
的南极或北极与传感器保持平行。
3.
打开发射机,接收机电源,在显示屏的接收机窗口内,会发现并显示“Motor speed 2:0RPM”,
试着转动,转速的值会发生变化,则表示安装成功。
(
Pic 12.3)
(
Pic 12.4)
(
Pic 12.5)
i-BUS receiver
, can connect 4 modules with 16 channels in serial at most. Button K1 and K4 correspond to C1 and C4
respectively.
Operation instruction:
1. FS-CEV04
i-BUS The “IN” port of F
S
-
CE
V04
receiver corresponds to “OUT” port of receiver.
2. FS-CEV04 i-BUS The “OUT” port of F
S
-
CE
V04
receiver is used to connect post level
F
S
-
CE
V04
receiver.
3. Insert the bus receiver to receiver, and then switch on the matched transmitter and receiver. The LED will be on.
4. Select main menu of receiver setup to enter the interface of servo setup.
5. Select channel which need to be expanded, meanwhile LED of bus receiver is off.
6. Push relevant channel button by plastic needle of matching line. The setup is successful if LED flashes automatically.
7. Insert servo to check.
8. Set up 4 channels of bus receiver as above steps.
9. Just connect a new bus receiver with “OUT” port of first stage bus receiver if more channel needed. Set up
the new one as
above steps.
Notice: When the load of serial bus receiver is excessive and electric current is higher than usual, please supply power
directly to the serial bus receiver or it will break cables.
Operation:
1. Insert one end of standard 3 PIN plug into “OUT” port of
RPM telemetry (magnetic)
module
, and insert the other end into “IN” port of receiver or other sensor, as shown
in the picture 12.4.
2. As shown in the picture 12.5: Inside hub of the model, the distance between sensor
and magnet is less than2mm. The North Pole or the south pole of the
magnet
has
to be paralleled with sensor.
3. Switch on transmitter and receiver. “Motor speed 2:0RPM” will be shown in receiver
window in display screen. Speed value changes as turning wheel, which means
installation is successful.
功能说明:
此功能是为了应对某些模型通道太多而做的,当通道不够时可采用此配件,来增加通道输出。
功能说明:
此功能是为了检测到模型的转速而设定的,用户可通过发射机来观察监测模 型的转速,当用户需要监测转速时可使用此配件。
The system is able to support many channels. This allows the user of the system to change to a different
output channel should signal strength be insufficient
This function allows the user to monitor turning speed via the transmitter. This is a
very useful function when determination of turning speed is required
Function Details
:
Function Details
:
i-bus Receiver Connection instruction Setup
5







































































