





























59
8.7.1 Servo speed- Set by function
This can reduce the output speed of some main
functions (such as aileron, throttle, rudder, spoiler,
etc.). The slow action times of start(
In speed
) and
recovery(
Out speed
) can be set separately, that is,
the slow action time can be changed by different
start and recovery speeds.
After setting the delay for the master function, all
channel outputs associated with this function will
have the slow actions. If the
Pro. Mixes
uses this
main function as the master, the slave outputs of
the same group will also have the slow actions.
For example, if you set the aileron function delay
time to 2S, the corresponding slave outputs of
the aileron functions such as
Aileron to Elevator
,
Aileron to Rudder
and other mix functions will
also change slowly.
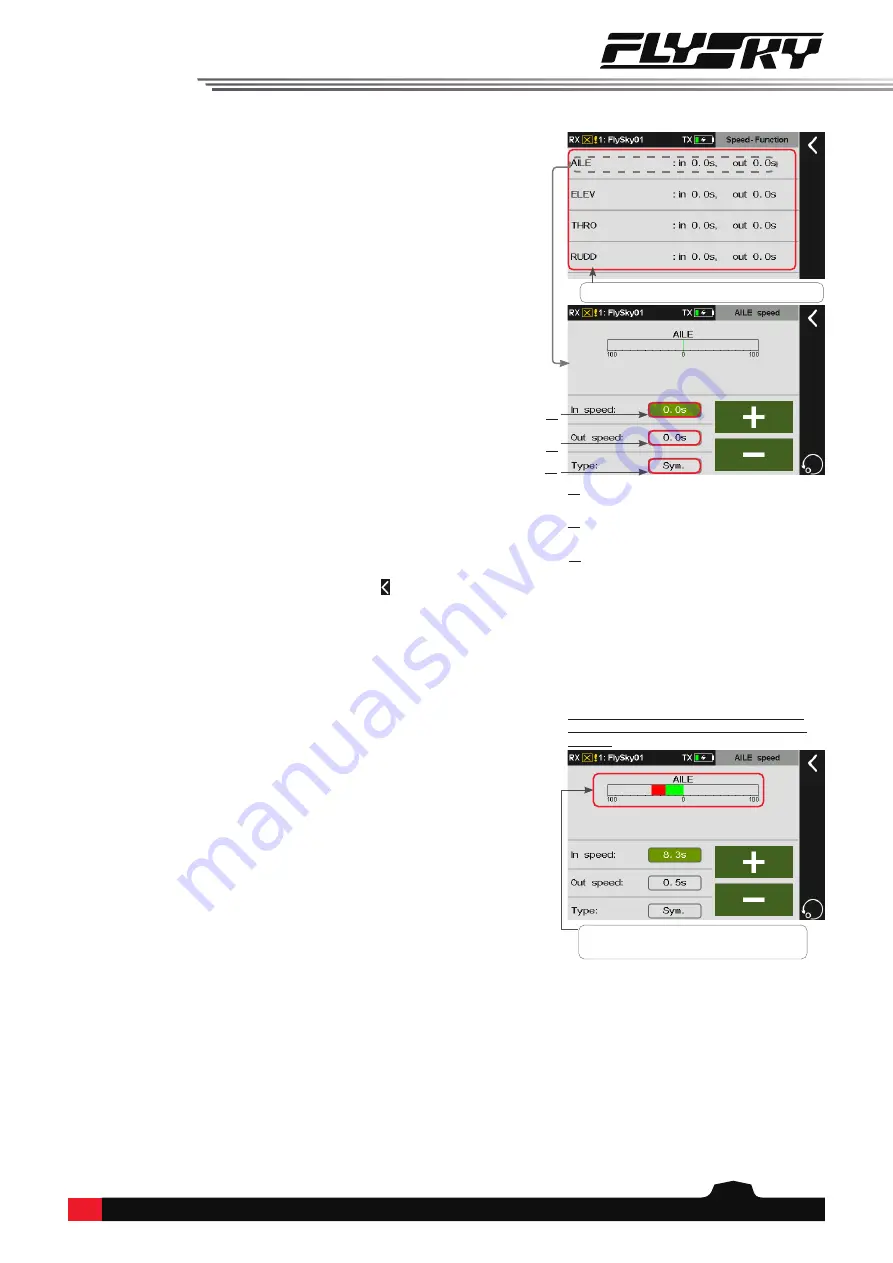
Function setup:
1.
Tap item you want to set to enter.
2. Tap the function box next to
In speed
, then
click
+
or
-
to set the time.
3. Tap the function box next to
Out speed
, then
Tap
+
or
-
to set the time.
4. Tap the function box next to
Type
, then click
to return to the previous interface.
Tap to enter the corresponding speed setting interface.
The red bar shows the set input value, the
green shows the output value.
⑴
⑵
⑴
Tap to select
In speed
, the shorter time is,
the faster speed is.
⑵
Tap to select
Out speed
, the shorter time is,
the faster speed is.
⑶
⑶
Tap to toggle between
Line
and
Sym.
(
symmetry).
Sym
means the neutral (ratio: 0%)
is the reference point.
Line
means the low end
(ratio: smallest value) is the reference point.
Note: Recovery refers to the value change from
far from the reference point to close to the
reference point, which is output by
Out speed
.
Start refers to the value change from close to
the reference point to far from the reference
point, which is output by In speed.
After setting, the interface shows below when
push/pull the
control
which is assigned to the
channel.
8.7.2 Servo speed- Set by channel
This can reduce the output speed of channels (such
as CH1, CH2, etc.). The slow action times of start
and recovery can be set separately, that is, the slow
action time can be changed by different start and
recovery speeds.
You can use this function if you want to simulate
the movement of a real aircraft or make up the
mechanical virtual position of the servo.
After setting the slow action time, all the volumes







































































