
























2-8
W1
H1
W
Q
D
Q
H
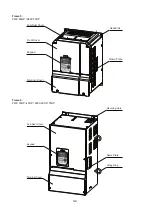
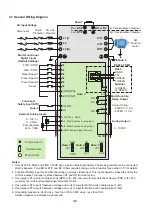
Models:
• TD400-2002-13PH
• TD400-2003-13PH
• TD400-2005-3PH
• TD400-4003-3PH
• TD400-4005-3PH
Frame 2
Dimensions in mm (inch)
W
W1
H
H1
D
Q
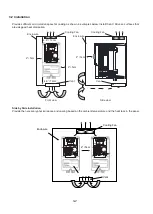
NEMA 1 Kit
H
128.7
(5.07)
118
(4.65)
187.6
(7.39)
177.6
(6.99)
152.4
(6)
M4
213.6
(8.41)
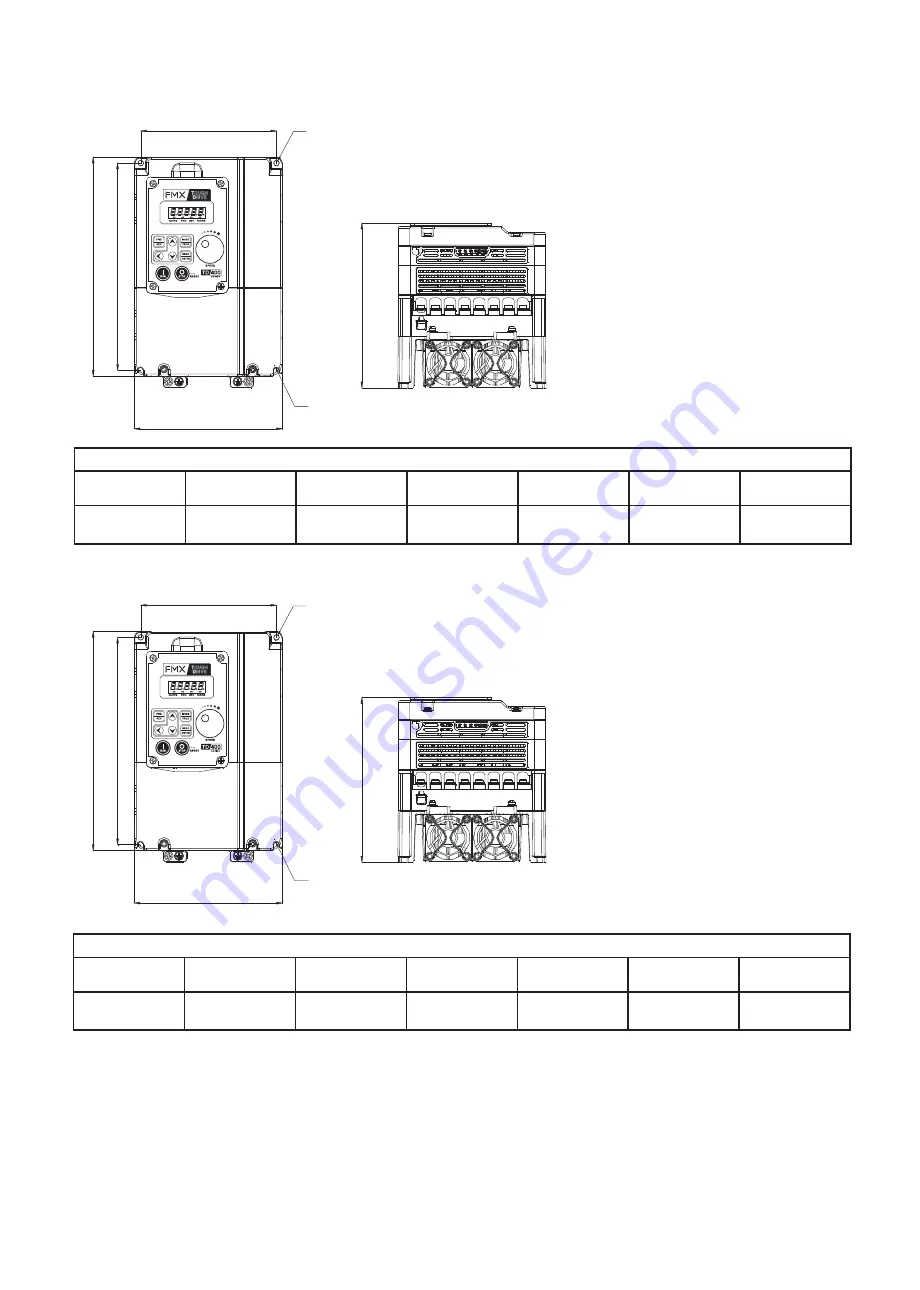
Frame 3
Models:
• TD400-27P5-3PH
• TD400-2010-3PH
• TD400-47P5-3PH
• TD400-4010-3PH
• TD400-4015-3PH
Dimensions in mm (inch)
W
W1
H
H1
D
Q
NEMA 1 Kit
H
186.9
(7.36)
175
(6.89)
260.9
(10.27)
249.8
(9.83)
202.6
(7.98)
M4
293.5
(11.56)
W1
H1
W
Q
D
Q
H







































































