



















38
39
13
Manual lift control
Handmatige liftbediening
With this function the liftmechanism can be controlled manually up and
down.
Met deze functie kan de liftfunctie handmatig op en neer worden bediend.
12
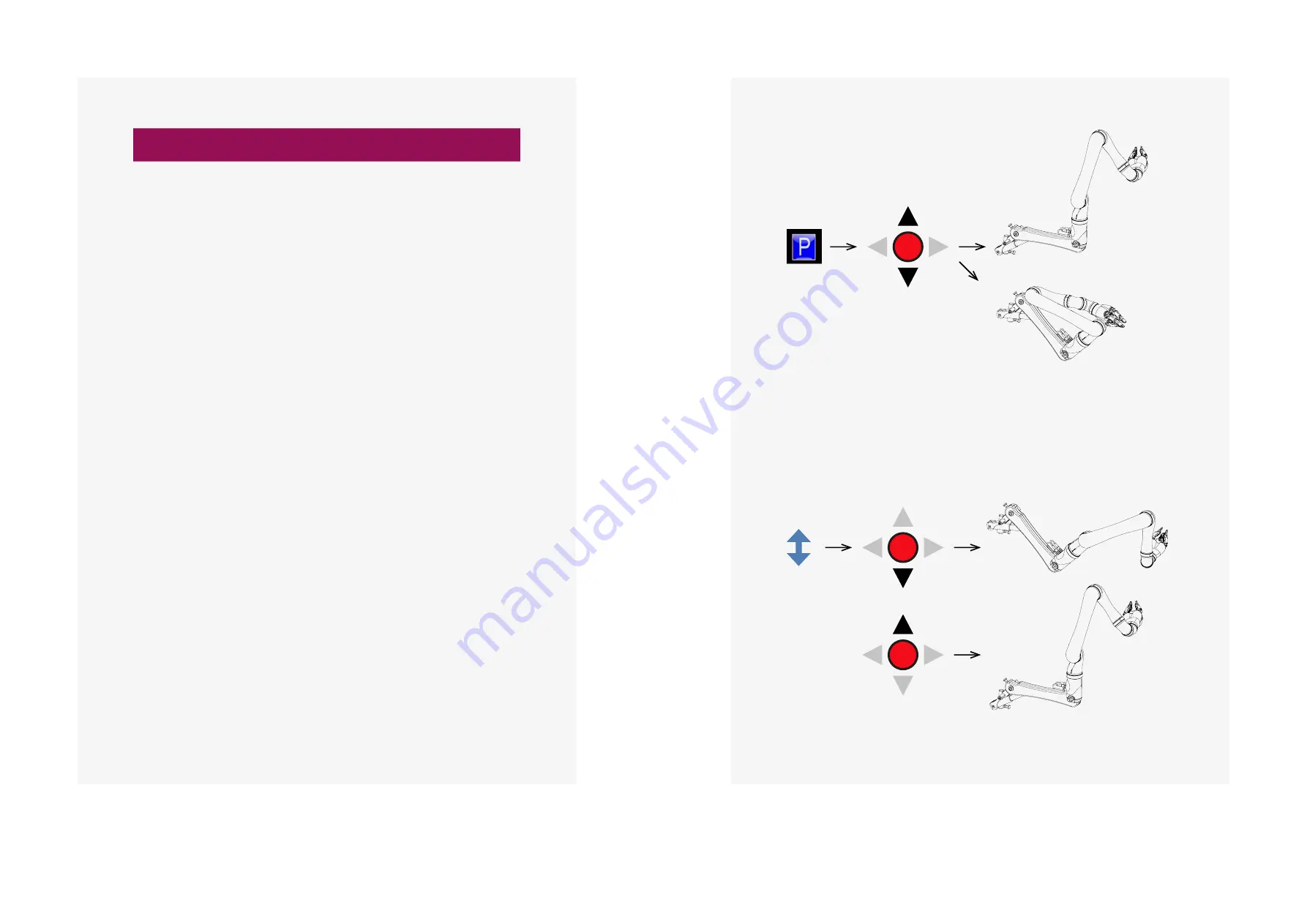
Park menu
/ Parkeerfunctie
User position / Home position
Gebruikersstand / Parkeerstand
Send the robotmanipulator to the user position:
De robotmanipulator naar de gebruikersstand:
•
Hold joystick forward or backwards. The robotmanipulator will now go to
the user position, the Robot Interface will move upwards;
Houd de joystick naar voren of achteren. De robotmanipulator gaat naar
de gebruikersstand en de Robot Interface gaat omhoog;
•
A beep will sound when the retract procedure has finished;
Een zoemer is te horen wanneer de procedure is voltooid;
•
When the joystick is being released the focus on the display will jump to
the 3rd icon.
Wanneer de joystick wordt losgelaten, zal op het display het derde
pictogram worden getoond.
Send the robotmanipulator to the home position:
De robotmanipulator naar de parkeerstand:
•
The robotmanipulator can be send to the home position by selecting the
icon shown above and hold the joystick forward or backwards;
De robotmanipulator kan naar de parkeerstand worden gestuurd door
het hieronder getoonde pictogram te selecteren en de joystick naar voren
of naar achteren te houden;
•
A beep will sound when the home procedure has finished;
Een zoemer is te horen wanneer de procedure is voltooid;
•
When the joystick is still being held, the robotmanipulator will shut
down after 3 second (when configured).
Wanneer de joystick wordt vastgehouden, wordt de robotmanipulator na
drie seconden uitgeschakeld (indien ingesteld).
Summary of Contents for 210030
Page 1: ...ID manual 606683 Revision 1 0 Date 1 March 2021 User manual Robot Interface...
Page 22: ...42 43 Appendix 5 Declaration of conformity 16...
Page 24: ...46 47...
Page 25: ...48...







































































