























16
17
Manual lift control
With this function the liftmechanism can be controlled manually up and down
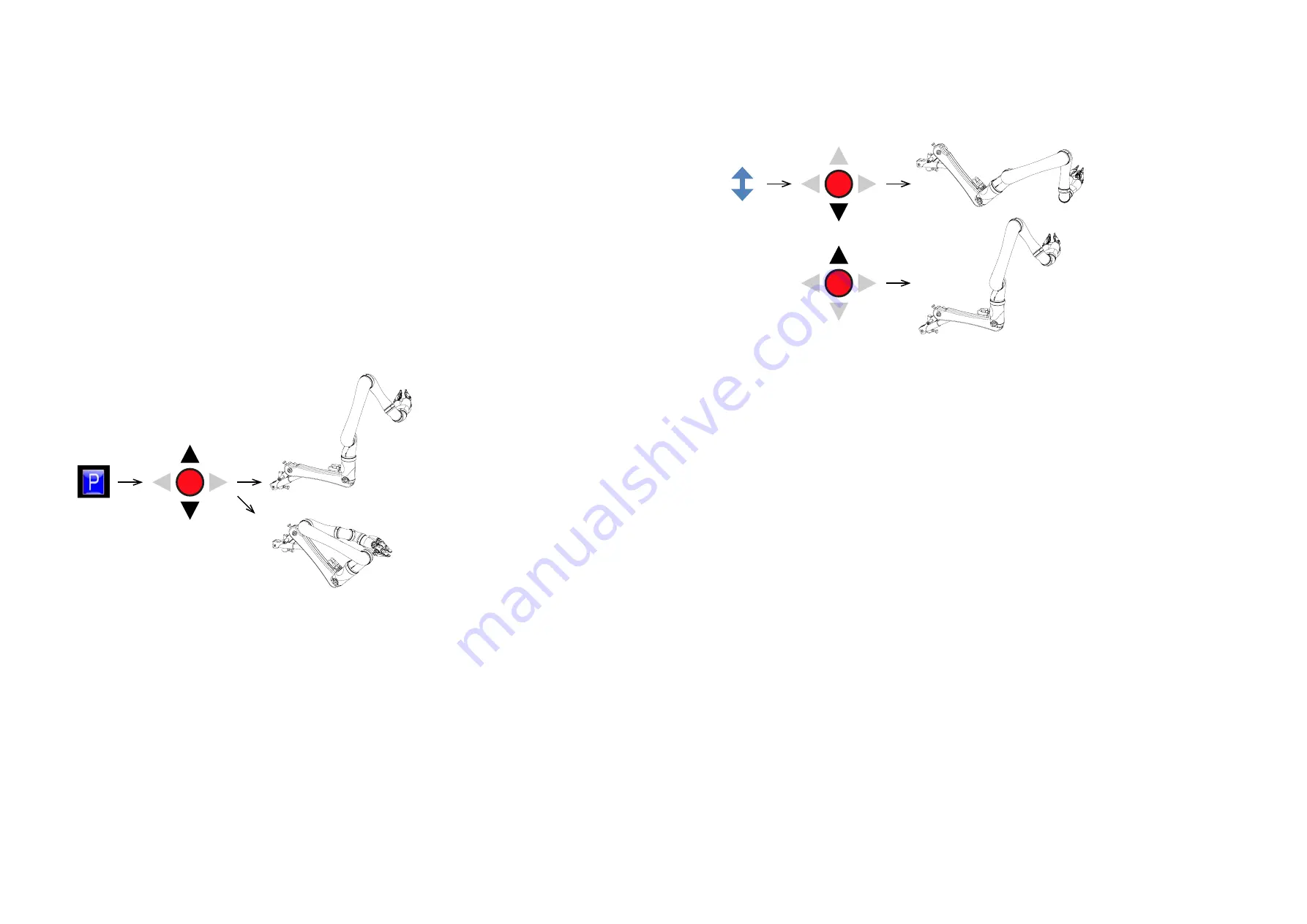
Park menu
User position / Home position
Send the robotmanipulator to the user position:
•
Hold joystick forward or backwards. The robotmanipulator will now go to the user position,
the Robot Interface will move upwards;
•
A beep will sound when the retract procedure has finished;
•
When the joystick is being released the focus on the display will jump to the 3rd icon.
Send the robotmanipulator to the home position:
•
The robotmanipulator can be send to the home position by selecting the icon shown above
and hold the joystick forward or backwards;
•
A beep will sound when the home procedure has finished;
•
When the joystick is still being held, the robotmanipulator will shut down after 3 second
(when configured).
Summary of Contents for 210030
Page 1: ...ID manual 606683 Revision 1 0 Date 1 March 2021 User manual Robot Interface...
Page 22: ...42 43 Appendix 5 Declaration of conformity 16...
Page 24: ...46 47...
Page 25: ...48...







































































