



















Bi-Focus
User Manual
©
2019 FOXTECH All Rights Reserved
20
Gimbal Debbuging/Control
Gimbal back to center
The gimbal can be set to the centering state by the control command, and the gimbal will be in this state
and keep the camera facing the front of the head.
Gimbal Yaw Locking
The gimbal can be set to work in YAW lock mode by controlling, in which the gimbal will not rotate with the
rotation of the aircraft's heading.
Gimbal YAW Following
The gimbal can be set to work in YAW following mode by controlling.In this mode the gimbal is possible to
maintain a constant angle between the heading and the fuselage and to rotate following the aircraft heading.
Attitude Control
The gimbal can be controlled by serial command, IBUS, SBUS moving at a fixed angular rate
in the heading and pitch directions.
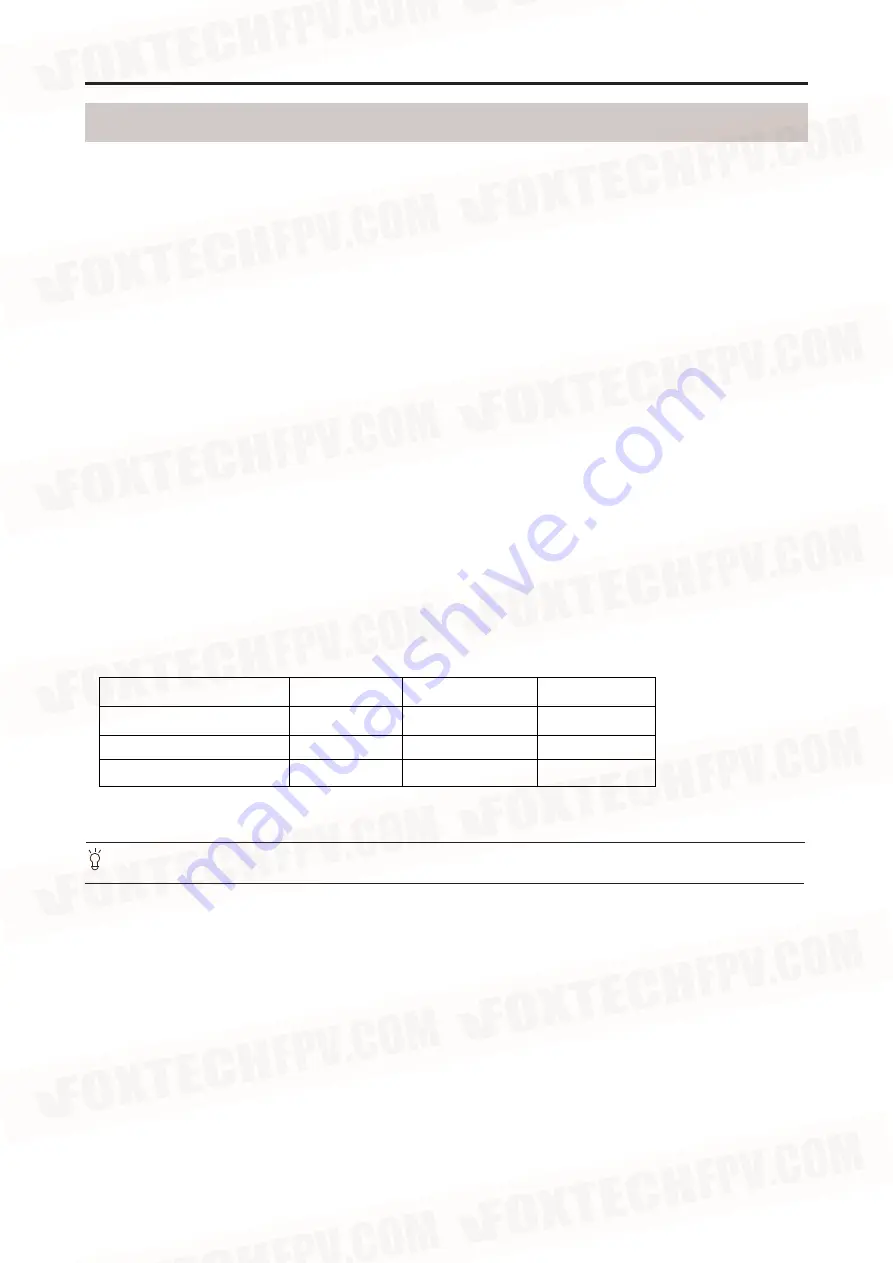
Speed Control
The gimbal has two modes: high speed mode and low speed mode. When the gimbal rotated, the speed is
adaptive based on the current speed mode and the visible light camera multiple:
multiple/speed mode((
1x
2x
4x
low speed(
10r/s
6r/s
4r/s
middle speed((((
15r/s
9r/s
6r/s
high speed(((
20r/s
12r/s
8r/s
The data are used to illustrate the speed control logic and not the actual speed.
Automatic Drift Correction
When used for a period of time or when the ambient temperature changes drastically
gimbal will have large drift that causes screen tilt or manual control inconvenience, and requires an
automatic drift correction command to calibrate.







































































