


















88
Deutsch
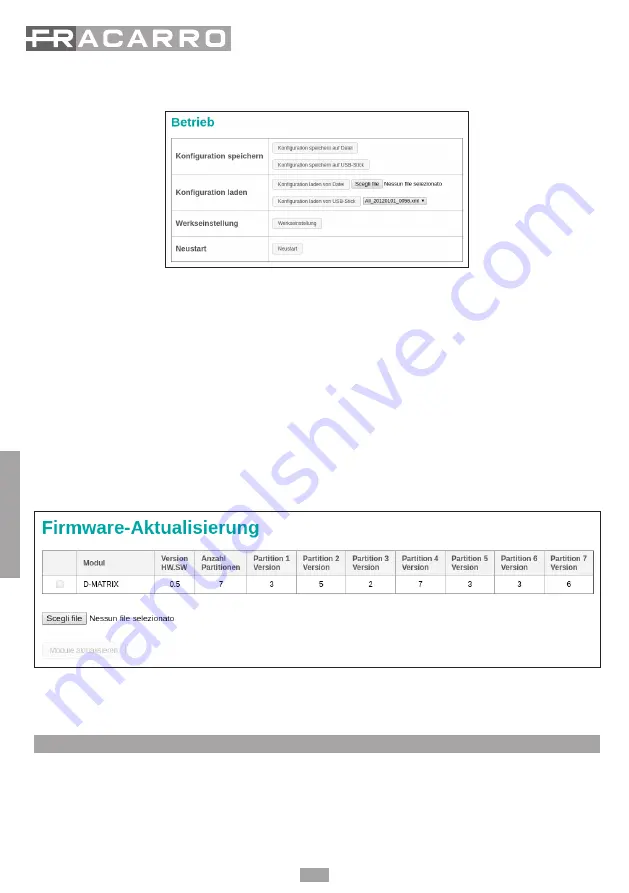
Über das Menü EINSTELLUNGEN
BETRIEB können Sie auf die Seiten zugreifen, um die Konfiguration direkt in Dateien, einem PC oder einem
USB-Laufwerk zu speichern.
Abbildung 16
Durch Klicken auf die entsprechenden Schaltflächen wird automatisch eine XML-Datei mit der vollständigen Konfiguration des D-MATRIX 4S EVO
direkt auf dem PC oder einem USB-Laufwerk gespeichert.
Nachdem eine oder mehrere Konfigurationsdateien auf dem PC oder einem USB-Laufwerk gespeichert wurden, kann die Konfiguration in die
D-MATRIX 4S EVO geladen werden: Wenn Sie auf die Schaltfläche zum Laden der Konfiguration klicken (aus Datei, Formular USB), wird eine zuvor
gespeicherte Konfigurationsdatei geladen .
Wählen Sie die gespeicherte Konfigurationsdatei aus und bestätigen Sie den Download, indem Sie auf “Konfiguration hochladen” klicken.
Wenn Sie auf die Schaltfläche Factory Default klicken, können Sie das Produkt mit den werkseitigen Standardeinstellungen zurücksetzen.
Durch Klicken auf die Schaltfläche Reboot wird das Modul neu gestartet.
5.5 FIRMWARE AKTUALISIEREN
Über das Menü EINSTELLUNGEN
FIRMWARE-AKTUALISIERUNG kann man die derzeit installierte Firmware prüfen und gegebenenfalls eine
Aktualisierung des Systems vornehmen.
Vor der Aktualisierung des Systems stellen Sie bitte sicher, dass in einem Verzeichnis auf dem PC oder auf einem USB-Stick das korrekte
Aktualisierungspaket zur Verfügung steht. Wählen Sie letzteres mit dem Button DURCHSUCHEN aus und klicken Sie den Button MODULE
AKTUALISIEREN an. Warten Sie bis zum Ende des Vorgangs.
Abbildung 17
Nach Beendigung der Aktualisierung kann deren Ausgang im folgenden Menü überprüft werden:
EINSTELLUNGEN
FIRMWARE-AKTUALISIERUNG.
6. HINWEISE FÜR DIE PROGRAMMIERUNG
VORBEMERKUNG: Bevor Sie mit der Programmierung des D-MATRIX 4S EVO beginnen, sollten Sie folgende grundsätzliche Hinweise
berücksichtigen:
Entscheiden Sie, ob Sie die Funktion ALL PID OUT verwenden wollen, oder ob Sie die Programme (PID), die am Ausgang verfügbar sein sollen,
einzeln programmieren wollen.
Bei Einsatz der ALL PID-Funktion wird der vom angegebenen Eingang empfangene Transportstream unverarbeitet an den Ausgang übertragen.
Es ist daher keine Steuerung der Ausgangskanäle notwendig, und alle Inhalte des Original-Transportstreams – auch wenn diese nicht dem
Standard entsprechen oder nicht korrekt sind – werden ohne Veränderungen weiterübertragen, wobei jedoch die Kompatibilität mit eventuellen
Decodern, die die Eingangsdaten „strenger“ steuern garantiert wird. Gleichzeitig ist jedoch keinerlei Steuerung der Programme oder Prioritäten







































































