




























Chapter 16 Freescale’s Scalable Controller Area Network (S12MSCANV3)
MC9S12XE-Family Reference Manual Rev. 1.19
Freescale Semiconductor
643
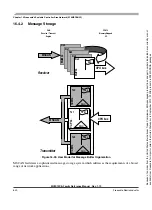
message in its RxBG (wrong identifier, transmission errors, etc.) the actual contents of the buffer will be
over-written by the next message. The buffer will then not be shifted into the FIFO.
When the MSCAN module is transmitting, the MSCAN receives its own transmitted messages into the
background receive buffer, RxBG, but does not shift it into the receiver FIFO, generate a receive interrupt,
or acknowledge its own messages on the CAN bus. The exception to this rule is in loopback mode (see
Section 16.3.2.2, “MSCAN Control Register 1 (CANCTL1)
”) where the MSCAN treats its own messages
exactly like all other incoming messages. The MSCAN receives its own transmitted messages in the event
that it loses arbitration. If arbitration is lost, the MSCAN must be prepared to become a receiver.
An overrun condition occurs when all receive message buffers in the FIFO are filled with correctly
received messages with accepted identifiers and another message is correctly received from the CAN bus
with an accepted identifier. The latter message is discarded and an error interrupt with overrun indication
is generated if enabled (see
Section 16.4.7.5, “Error Interrupt
”). The MSCAN remains able to transmit
messages while the receiver FIFO being filled, but all incoming messages are discarded. As soon as a
receive buffer in the FIFO is available again, new valid messages will be accepted.
16.4.3
Identifier Acceptance Filter
The MSCAN identifier acceptance registers (see
Section 16.3.2.12, “MSCAN Identifier Acceptance
”) define the acceptable patterns of the standard or extended identifier
(ID[10:0] or ID[28:0]). Any of these bits can be marked ‘don’t care’ in the MSCAN identifier mask
registers (see
Section 16.3.2.18, “MSCAN Identifier Mask Registers (CANIDMR0–CANIDMR7)
”).
A filter hit is indicated to the application software by a set receive buffer full flag (RXF = 1) and three bits
in the CANIDAC register (see
Section 16.3.2.12, “MSCAN Identifier Acceptance Control Register
”). These identifier hit flags (IDHIT[2:0]) clearly identify the filter section that caused the
acceptance. They simplify the application software’s task to identify the cause of the receiver interrupt. If
more than one hit occurs (two or more filters match), the lower hit has priority.
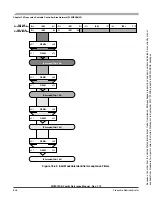
A very flexible programmable generic identifier acceptance filter has been introduced to reduce the CPU
interrupt loading. The filter is programmable to operate in four different modes (see Bosch CAN 2.0A/B
protocol specification):
•
Two identifier acceptance filters, each to be applied to:
— The full 29 bits of the extended identifier and to the following bits of the CAN 2.0B frame:
– Remote transmission request (RTR)
– Identifier extension (IDE)
– Substitute remote request (SRR)
— The 11 bits of the standard identifier plus the RTR and IDE bits of the CAN 2.0A/B messages
1
.
This mode implements two filters for a full length CAN 2.0B compliant extended identifier.
shows how the first 32-bit filter bank (CANIDAR0–CANIDAR3,
CANIDMR0–CANIDMR3) produces a filter 0 hit. Similarly, the second filter bank
(CANIDAR4–CANIDAR7, CANIDMR4–CANIDMR7) produces a filter 1 hit.
•
Four identifier acceptance filters, each to be applied to
1. Although this mode can be used for standard identifiers, it is recommended to use the four or eight identifier acceptance
filters for standard identifiers
Because
of
an
order
from
the
United
States
International
Trade
Commission,
BGA-packaged
product
lines
and
part
numbers
indicated
here
currently
are
not
available
from
Freescale
for
import
or
sale
in
the
United
States
prior
to
September
2010:
S12XE
products
in
208
MAPBGA
packages







































































