



























Motor Controller (MC10B8CV1)
MC9S12XHY-Family Reference Manual, Rev. 1.01
Freescale Semiconductor
677
NOTE
The PWM motor controller will release the pins after the next PWM timer
counter overflow without accommodating any channel delay if a single
channel has been disabled or if the period register has been cleared or all
channels have been disabled. Program one or more inactive PWM frames
(duty cycle = 0) before writing a configuration that disables a single channel
or the entire PWM motor controller.
20.3.2.5
Motor Controller Duty Cycle Registers
Each duty cycle register sets the sign and duty functionality for the respective PWM channel.
The contents of the duty cycle registers define DUTY, the number of motor controller timer counter clocks
the corresponding output is driven low (RECIRC = 0) or is driven high (RECIRC = 1). Setting all bits to 0
will give a static high output in case of RECIRC = 0; otherwise, a static low output. Values greater than
or equal to the contents of the period register will generate a static low output in case of RECIRC = 0, or
a static high output if RECIRC = 1. The layout of the duty cycle registers differ dependent upon the state
of the FAST bit in the control register 0.
Table 20-9. Channel Delay
CD[1:0]
n [# of PWM Clocks]
00
0
01
1
10
2
11
3
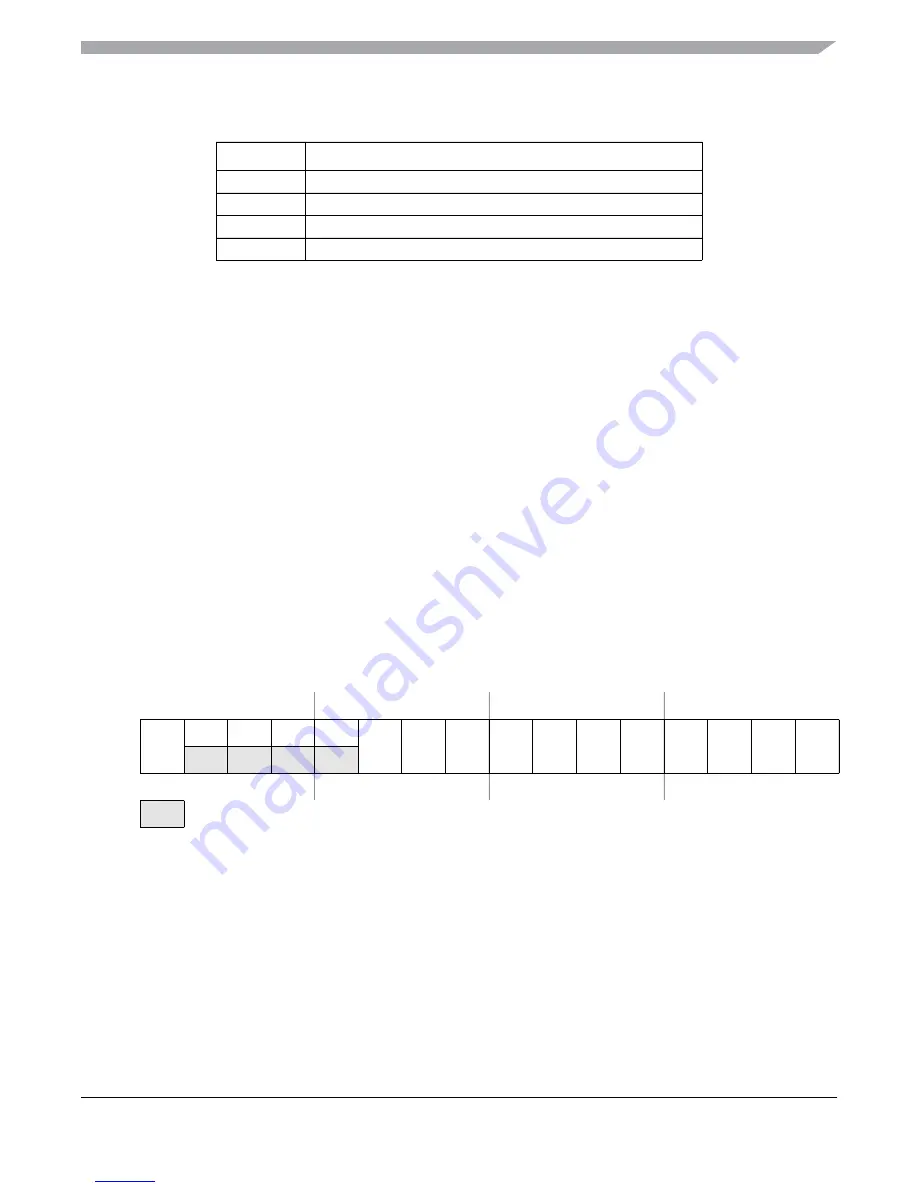
Offset Module Base + 0x0020 . . . 0x002F
Access: User read/write
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
R
S
S
S
S
S
D10
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
W
Reset
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
= Unimplemented or Reserved
Figure 20-8. Motor Controller Duty Cycle Register x (MCDCx) with FAST = 0
electronic components distributor







































































