



























Motor Controller (MC10B8CV1)
MC9S12XHY-Family Reference Manual, Rev. 1.01
Freescale Semiconductor
681
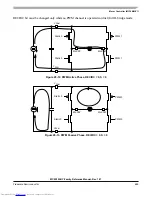
Figure 20-10. Typical Dual Full H-Bridge Mode Configuration
Whenever FAST = 0 only 16-bit write accesses to the duty cycle registers are allowed, 8-bit write accesses
can lead to unpredictable duty cycles.
While fast mode is enabled (FAST = 1), 8-bit write accesses to the high byte of the duty cycle registers are
allowed, because only the high byte of the duty cycle register is used to determine the duty cycle.
The following sequence should be used to update the current magnitude and direction for coil 0 and coil
1 of the motor to achieve consistent PWM output:
1. Write to duty cycle register x
2. Write to duty cycle register x + 1.
At the next timer counter overflow, the duty cycle registers will be copied to the working duty cycle
registers. Sequential writes to the duty cycle register x will result in the previous data being overwritten.
20.4.1.1.2
Full H-Bridge Mode (MCOM = 10)
In full H-bridge mode, the PWM channels x and x + 1 operate independently. The duty cycle working
registers are updated whenever a timer counter overflow occurs.
20.4.1.1.3
Half H-Bridge Mode (MCOM = 00 or 01)
In half H-bridge mode, the PWM channels x and x + 1 operate independently. In this mode, each PWM
channel can be configured such that one pin is released and the other pin is a PWM output.
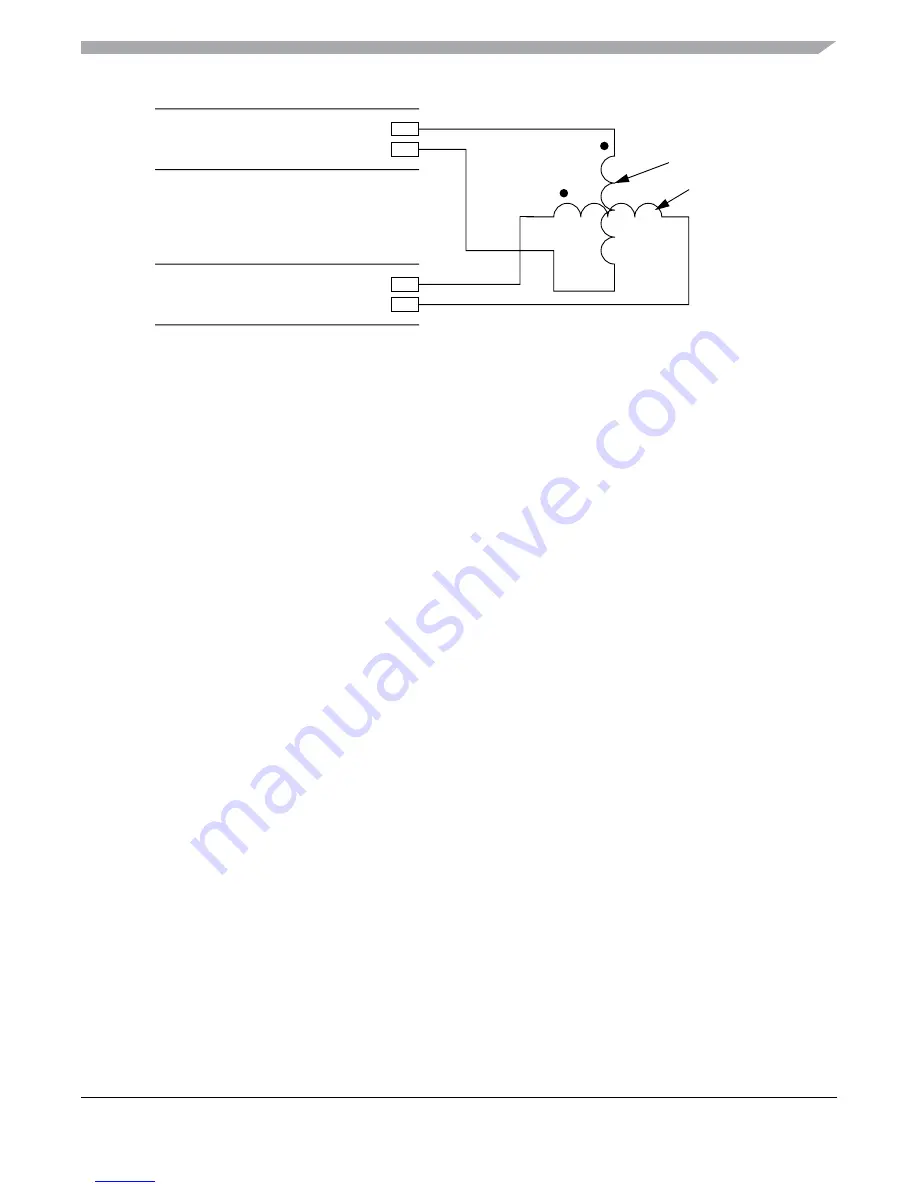
Figure 20-11
shows a typical configuration in half H-bridge mode.
The two pins associated with each channel are switchable between released mode and PWM output
dependent upon the state of the MCOM[1:0] bits in the MCCCx (channel control) register. See register
description in
Section 20.3.2.4, “Motor Controller Channel Control Registers”
. In half H-bridge mode, the
state of the S bit has no effect.
PWM Channel x
PWM Channel x + 1
MnC0P
MnC0M
MnC1P
MnC1M
Motor n, Coil 0
Motor n, Coil 1
electronic components distributor







































































