



























Chapter 16 Motor Controller (MC10B8CV1)
S12ZVHY/S12ZVHL Family Reference Manual Rev. 1.05
596
Freescale Semiconductor
16.2
External Signal Description
The motor controller is associated with 8 pins.
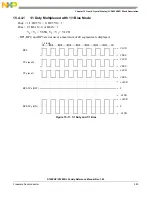
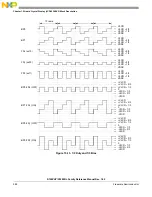
lists the relationship between the PWM channels
and signal pins as well as PWM channel pair (motor number), coils, and nodes they are supposed to drive
if all channels are set to dual full H-bridge configuration.
16.2.1
M0C0M/M0C0P/M0C1M/M0C1P — PWM Output Pins for Motor 0
High current PWM output pins that can be used for motor drive. These pins interface to the coils of
motor 0. PWM output on M0C0M results in a positive current flow through coil 0 when M0C0P is driven
to a logic high state. PWM output on M0C1M results in a positive current flow through coil 1 when
M0C1P is driven to a logic high state.
16.2.2
M1C0M/M1C0P/M1C1M/M1C1P — PWM Output Pins for Motor 1
High current PWM output pins that can be used for motor drive. These pins interface to the coils of
motor 1. PWM output on M1C0M results in a positive current flow through coil 0 when M1C0P is driven
to a logic high state. PWM output on M1C1M results in a positive current flow through coil 1 when
M1C1P is driven to a logic high state.
16.3
Memory Map and Register Definition
This section provides a detailed description of all registers of the 11-bit 4-channel motor controller
module.
16.3.1
Module Memory Map
shows the memory map of the 11-bit 4-channel motor controller module.
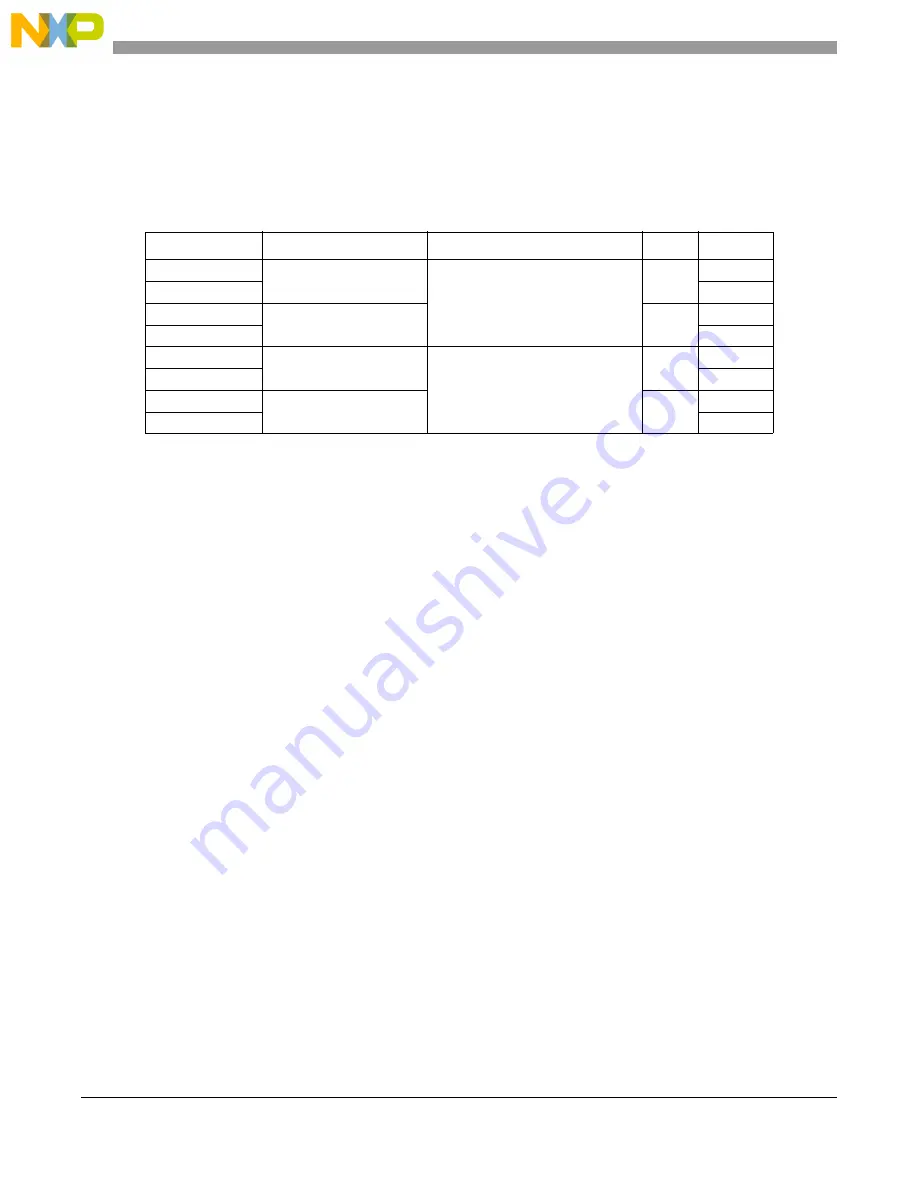
Table 16-2. PWM Channel and Pin Assignment
Pin Name
PWM Channel
PWM Channel Pair
(1)
1. A PWM Channel Pair always consists of PWM channel x and PWM channel x+1 (x = 2
n). The term
“PWM Channel Pair” is equivalent to the term “Motor”. E.g. Channel Pair 0 is equivalent to Motor 0
Coil
Node
M0C0M
0
0
0
Minus
M0C0P
Plus
M0C1M
1
1
Minus
M0C1P
Plus
M1C0M
2
1
0
Minus
M1C0P
Plus
M1C1M
3
1
Minus
M1C1P
Plus







































































