





























Freescale Semiconductor
30-1
MCF52235 ColdFire® Integrated Microcontroller Reference Manual, Rev. 6
Chapter 30
FlexCAN
30.1
Introduction
The FlexCAN is a communication controller implementing the controller area network (CAN) protocol,
an asynchronous communications protocol used in automotive and industrial control systems. It is a high
speed (1 Mbps), short distance, priority-based protocol that can communicate using a variety of mediums
(such as fiber optic cable or an unshielded twisted pair of wires). The FlexCAN supports the standard and
extended identifier (ID) message formats specified in the CAN protocol specification, revision 2.0, part B.
The CAN protocol was primarily, but not only, designed to be used as a vehicle serial data bus, meeting
the specific requirements of this field: real-time processing, reliable operation in the EMI environment of
a vehicle, cost-effectiveness, and required bandwidth. A general working knowledge of the CAN protocol
revision 2.0 is assumed in this document. For details, refer to the CAN protocol revision 2.0 specification.
30.1.1
Block Diagram
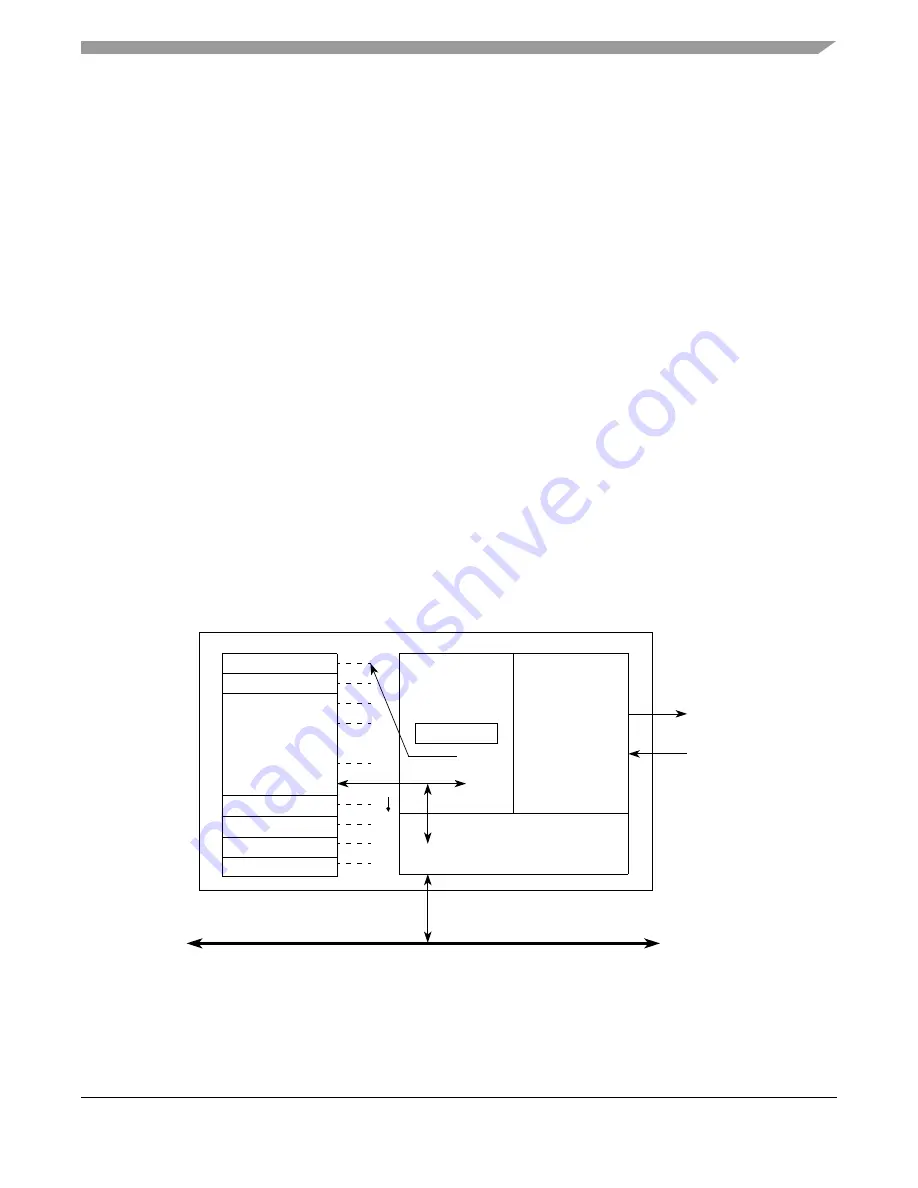
A block diagram describing the various submodules of the FlexCAN module is shown in
.
Each submodule is described in detail in subsequent sections.
Figure 30-1. FlexCAN Block Diagram
••
MB3
MB2
MB1
MB0
Clocks, Address and Data Buses,
CAN
Protocol
Interface
Message
Buffer
Management
CANTX
CANRX
Bus Interface Unit
Max MB #
Internal Bus Interface
Interrupt and Test Signals
FlexCAN
••
••
••
••
••
••
••
••
••
MB15
MB14
[0:15]
Because
of
an
order
from
the
United
States
International
Trade
Commission,
BGA-packaged
product
lines
and
part
numbers
indicated
here
currently
are
not
available
from
Freescale
for
import
or
sale
in
the
United
States
prior
to
September
2010:MCF52234CVM60,
MCF52235CVM60







































































