





























CAN 2.0B Controller Module
MPC561/MPC563 Reference Manual, Rev. 1.2
16-34
Freescale Semiconductor
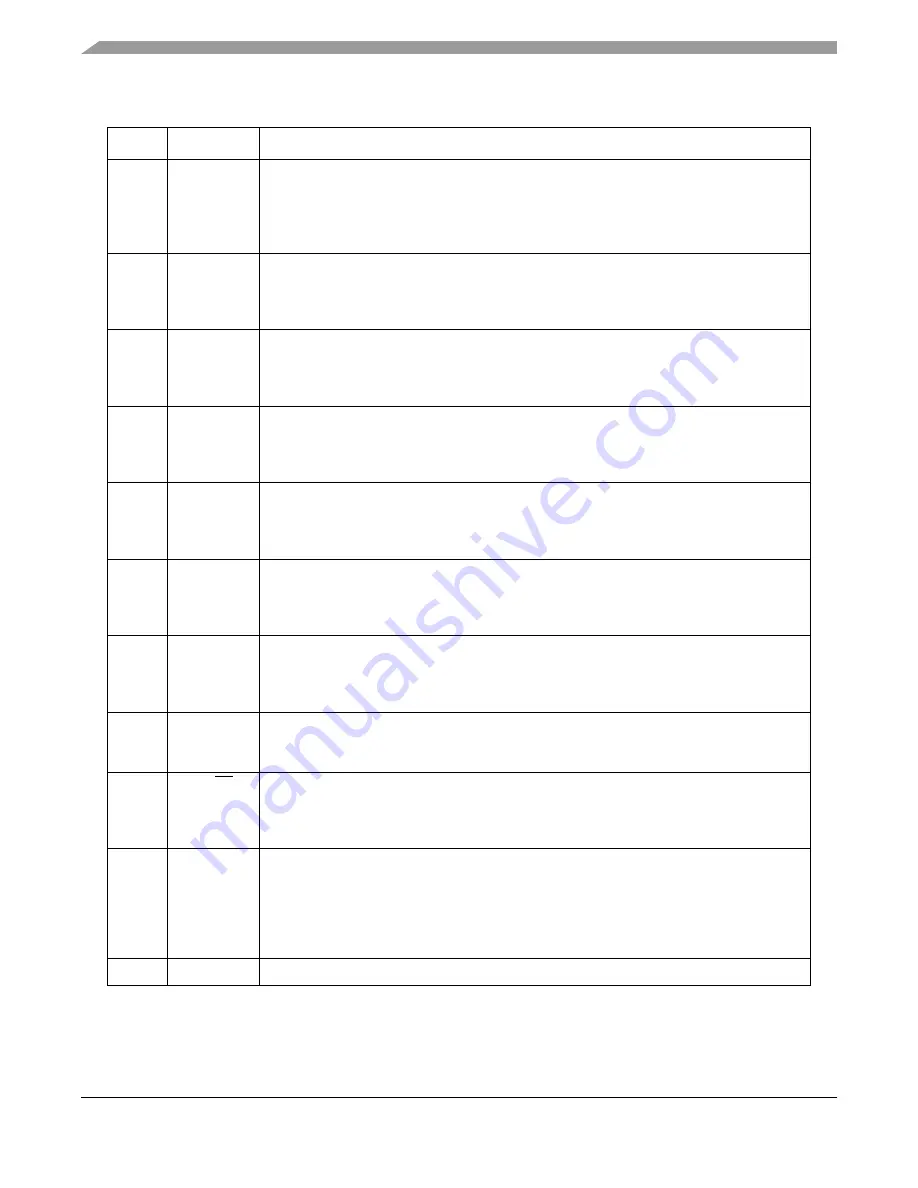
Table 16-23. ESTAT Bit Descriptions
Bits
Name
Description
0:1
BITERR
Transmit bit error. The BITERR[1:0] field is used to indicate when a transmit bit error occurs.
Refer to
.
NOTE: The transmit bit error field is not modified during the arbitration field or the ACK slot
bit time of a message, or by a transmitter that detects dominant bits while sending a passive
error frame.
2
ACKERR
Acknowledge error. The ACKERR bit indicates whether an acknowledgment has been
correctly received for a transmitted message.
0 No ACK error was detected since the last read of this register
1 An ACK error was detected since the last read of this register
3
CRCERR
Cyclic redundancy check error. The CRCERR bit indicates whether or not the CRC of the
last transmitted or received message was valid.
0 No CRC error was detected since the last read of this register
1 A CRC error was detected since the last read of this register
4
FORMERR
Message format error. The FORMERR bit indicates whether or not the message format of
the last transmitted or received message was correct.
0 No format error was detected since the last read of this register
1 A format error was detected since the last read of this register
5
STUFFERR
Bit stuff error. The STUFFERR bit indicates whether or not the bit stuffing that occurred in
the last transmitted or received message was correct.
0 No bit stuffing error was detected since the last read of this register
1 A bit stuffing error was detected since the last read of this register
6
TXWARN
Transmit error status flag. The TXWARN status flag reflects the status of the TouCAN
transmit error counter.
0 Transmit error counter
<
96
1 Transmit error counter
≥
96
7
RXWARN
Receiver error status flag. The RXWARN status flag reflects the status of the TouCAN
receive error counter.
0 Receive error counter
<
96
1 Receive error counter
≥
96
8
IDLE
Idle status. The IDLE bit indicates when there is activity on the CAN bus.
0 The CAN bus is not idle
1 The CAN bus is idle
9
TX/RX
Transmit/receive status. The TX/RX bit indicates when the TouCAN module is transmitting or
receiving a message. TX/RX has no meaning when IDLE = 1.
0 The TouCAN is receiving a message if IDLE = 0
1 The TouCAN is transmitting a message if IDLE = 0
10:11
FCS
Fault confinement state. The FCS[1:0] field describes the state of the TouCAN. Refer to
If the SOFTRST bit in CANMCR is asserted while the TouCAN is in the bus off state, the error
and status register is reset, including FCS[1:0]. However, as soon as the TouCAN exits reset,
FCS[1:0] bits will again reflect the bus off state. Refer to
Section 16.3.4, “Error Counters
” for
more information on entry into and exit from the various fault confinement states.
12
—
Reserved
Summary of Contents for MPC561
Page 84: ...MPC561 MPC563 Reference Manual Rev 1 2 lxxxiv Freescale Semiconductor...
Page 144: ...Signal Descriptions MPC561 MPC563 Reference Manual Rev 1 2 2 46 Freescale Semiconductor...
Page 206: ...Central Processing Unit MPC561 MPC563 Reference Manual Rev 1 2 3 62 Freescale Semiconductor...
Page 302: ...Reset MPC561 MPC563 Reference Manual Rev 1 2 7 14 Freescale Semiconductor...
Page 854: ...Time Processor Unit 3 MPC561 MPC563 Reference Manual Rev 1 2 19 24 Freescale Semiconductor...
Page 968: ...Development Support MPC561 MPC563 Reference Manual Rev 1 2 23 54 Freescale Semiconductor...
Page 1144: ...Internal Memory Map MPC561 MPC563 Reference Manual Rev 1 2 B 34 Freescale Semiconductor...
Page 1212: ...TPU3 ROM Functions MPC561 MPC563 Reference Manual Rev 1 2 D 60 Freescale Semiconductor...
Page 1216: ...Memory Access Timing MPC561 MPC563 Reference Manual Rev 1 2 E 4 Freescale Semiconductor...







































































