





























FlexRay Communication Controller (FLEXRAY)
Freescale Semiconductor
22-151
PXR40 Microcontroller Reference Manual, Rev. 1
The controller uses a sequential search algorithm to determine the individual message buffer assigned or
subscribed to the next slot. This search must be finished within one FlexRay slot. The shortest FlexRay
slot is an empty dynamic slot. An empty dynamic slot is a minislot and consists of
gdMinislot
macroticks
with a nominal duration of
gdMacrotick
. The minimum duration of a corrected macrotick is
gdMacrotick
min
= 39 µ
T. This results in a minimum slot length of
Eqn. 22-30
The search engine is located in the CHI and runs on the CHI clock. It evaluates one individual message
buffer per CHI clock cycle. For internal status update and double buffer commit operations, and as a result
of the clock domain crossing jitter, an additional amount of 10 CHI clock cycles is required to ensure
correct operation. For a given number of message buffers and for a given CHI clock frequency f
chi
, this
results in a search duration of
Eqn. 22-31
The message buffer search must be finished within one slot which requires that
must be
fulfilled
Eqn. 22-32
This results in the formula given in
which determines the required minimum CHI
frequency for a given number of message buffers that are utilized.
Eqn. 22-33
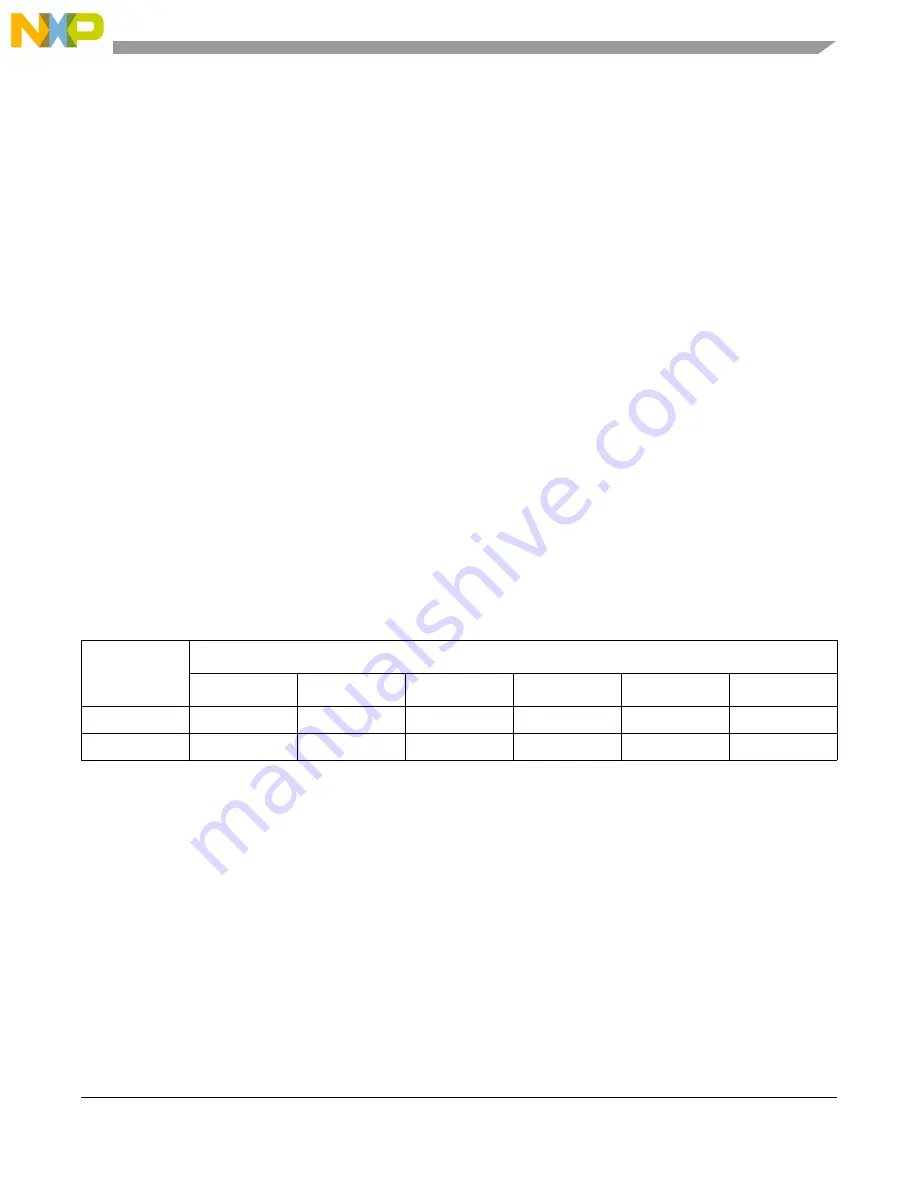
The minimum CHI frequency for a selected set of relevant protocol parameters is given in
22.7.4
Protocol Control Command Execution
This section considers the issues of the protocol control command execution.
The application issues any of the protocol control commands listed in the POCCMD field of
by writing the command to the POCCMD field of the
Protocol Operation Control Register (POCR)
result the controller sets the BSY bit while the command is transferred to the PE. When the PE has
accepted the command, the BSY flag is cleared. All commands are accepted by the PE.
The PE maintains a protocol command vector. For each command that was accepted by the PE, the PE sets
the corresponding command bit in the protocol command vector. If a command is issued while the
corresponding command bit is set, the command is not queued and is lost.
Table 22-118. Minimum f
chi
[MHz] examples (128 message buffers)
pdMicrotick
[ns]
gdMinislot
2
3
4
5
6
7
25.0
70.77
47.18
35.39
28.31
23.59
20.22
50.0
35.39
23.59
17.70
14.16
11.80
10.11
slotmin
39
pdMicrotick gdMinislot
=
search
1
f
chi
--------
# MessageBuffers
10
+
=
search
slotmin
f
chi
# MessageBuffers
10
+
39
pdMicrotick gdMinislot
----------------------------------------------------------------------
Summary of Contents for PXR4030
Page 1: ...PXR40 Microcontroller Reference Manual Devices Supported PXR4030 PXR4040 PXR40RM Rev 1 06 2011...
Page 30: ...PXR40 Microcontroller Reference Manual Rev 1 Freescale Semiconductor xxx...
Page 40: ...PXR40 Microcontroller Reference Manual Rev 1 xl Freescale Semiconductor...
Page 66: ...Memory Map PXR40 Microcontroller Reference Manual Rev 1 2 4 Freescale Semiconductor...
Page 120: ...Signal Descriptions 3 54 Freescale Semiconductor PXR40 Microcontroller Reference Manual Rev 1...
Page 860: ...FlexCAN Module 24 50 Freescale Semiconductor PXR40 Microcontroller Reference Manual Rev 1...
Page 1167: ...Decimation Filter Freescale Semiconductor 28 53 PXR40 Microcontroller Reference Manual Rev 1...
Page 1168: ...Decimation Filter 28 54 Freescale Semiconductor PXR40 Microcontroller Reference Manual Rev 1...







































































