





























X20/X20S and Ethos v1.2.10 User Manual
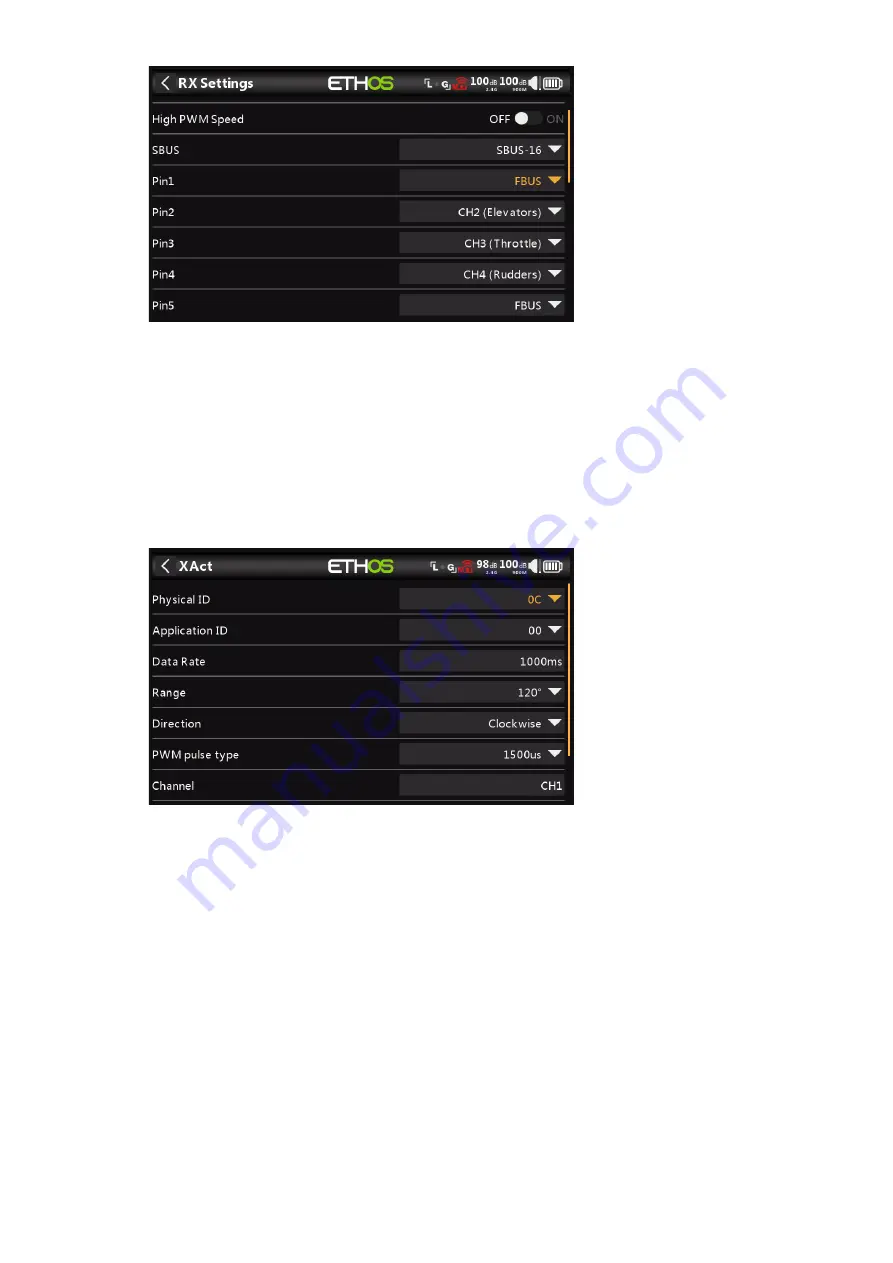
Repeat for pin5, to change the default PWM connection to the FBUS protocol.
The R18 receiver is now ready to operate two Xact servos plugged into Pin1 and Pin5
via the FBUS protocol.
Step 4: Configure the Physical IDs
Next we have to configure the Physical IDs for the two Xact servos. Note that they must
be unique to avoid conflict on the FBUS.
Step 4a: Configure the Physical ID for servo 1
For the first servo we can leave the Physical ID at the default 0C hex.
With only the first servo plugged in at Pin1, go to Telemetry and delete all sensors,
and then discover all sensors again. Then go to the Device Config / Xact and confirm
that the default Physical ID is 0C hex.
217
rev 3
Summary of Contents for TANDEM X20
Page 1: ...X20 and Ethos User Manual...







































































