





























4 Modules
20
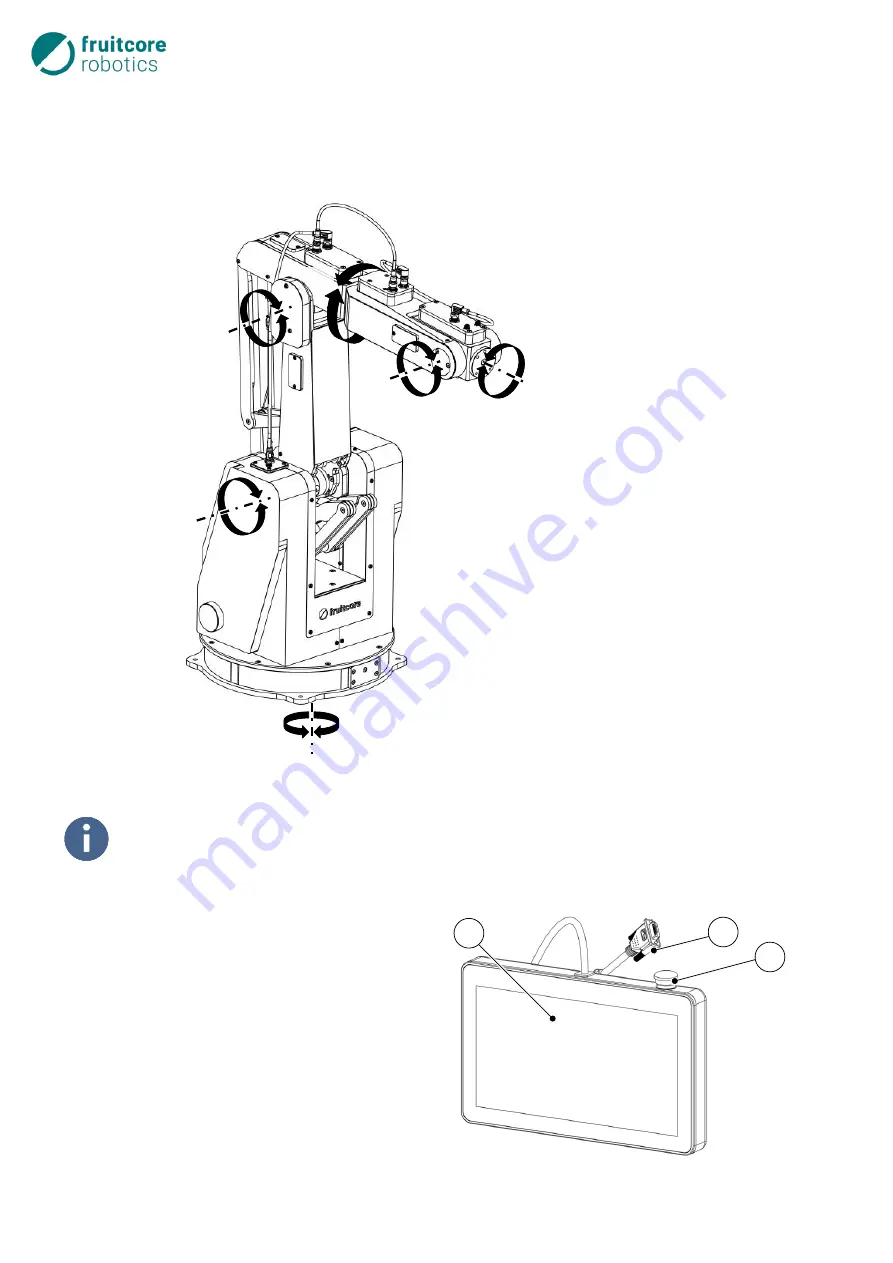
Robot axes
The kinematics of the robot are based on multiple four-bar linkages. This provides it with great mobility
and an optimum ratio of range and load capacity.
The movements are realized via the rotation around 6 robot axes.
Fig. 4-2:
Robot axes
You can find the values for the ranges of movement in the Annex
page68.
4.2.2
horstPANEL (operating panel)
1 Touch display (user interface)
2 Connection to horstCONTROL
3 Emergency stop button
The horstPANEL features a portable
operating panel equipped with a touchscreen
display. It is connected to the horstCONTROL
by a DVI cable.
As standard, a 5 m long DVI cable is supplied.
Up to 15 m are possible after consultation
with fruitcore robotics GmbH.
Fig. 4-3: horstPANEL operating panel
A1
A2
+
–
+
–
A3
+
–
A5
+
–
A6
+
–
A4
+
–
1
3
2
Summary of Contents for HORST900
Page 3: ...III ...






































































