



















– 11 –
7-4
Self-tuning Control
Self-tuning Control is a control which automatically calculate the value of PID, under the condi-
tion that the control target or set value (SV) changes.
Self-tuning is especially effective for situations when a high level of control is not needed, but
auto-tuning cannot be run due to frequent changes in the control target conditions.
Conditions where self-tuning can be used
Self-tuning is used in the following situations:
•
When temperature rises when the power is turned on
•
When temperature rises when SV changes (or when the controller decides it is necessary)
•
When the controller decides it is necessary because the controls have become unstable
Conditions where self-tuning cannot be used
Self-tuning cannot be used in the following situations:
•
During control standby
•
During ON/OFF (2-position) control
•
During auto-tuning
•
During ramp soak progress
•
When there is error input
•
When set for dual output
•
When any of the P, I, D, Ar parameters are set to manual
•
During manual mode
•
During soft start progress
Conditions to halt self-tuning
Halt self-tuning in the following situations:
•
When there is a change in SV (This includes the case where SV changes because of the
ramp soak function, remote SV function, or ramp SV.)
•
When self-tuning has not finished after running for nine or more hours
Setting self-tuning
7-5
PID2 Control
In case which the power supply of the control target goes ON
→
OFF
→
ON, this PID2 control
can suppress the amount of overshoot.
This control introduces an algorithm to prevent the calculated PID result from becoming a mis-
calculation, even when the control loop is open.
You will need to run auto-tuning to set the Pid parameter when using Pid2 control.
●
Features of PID2 Control
Setting PID2 control
7-6
Auto-tuning
Run auto-tuning to set the PID parameter automatically.
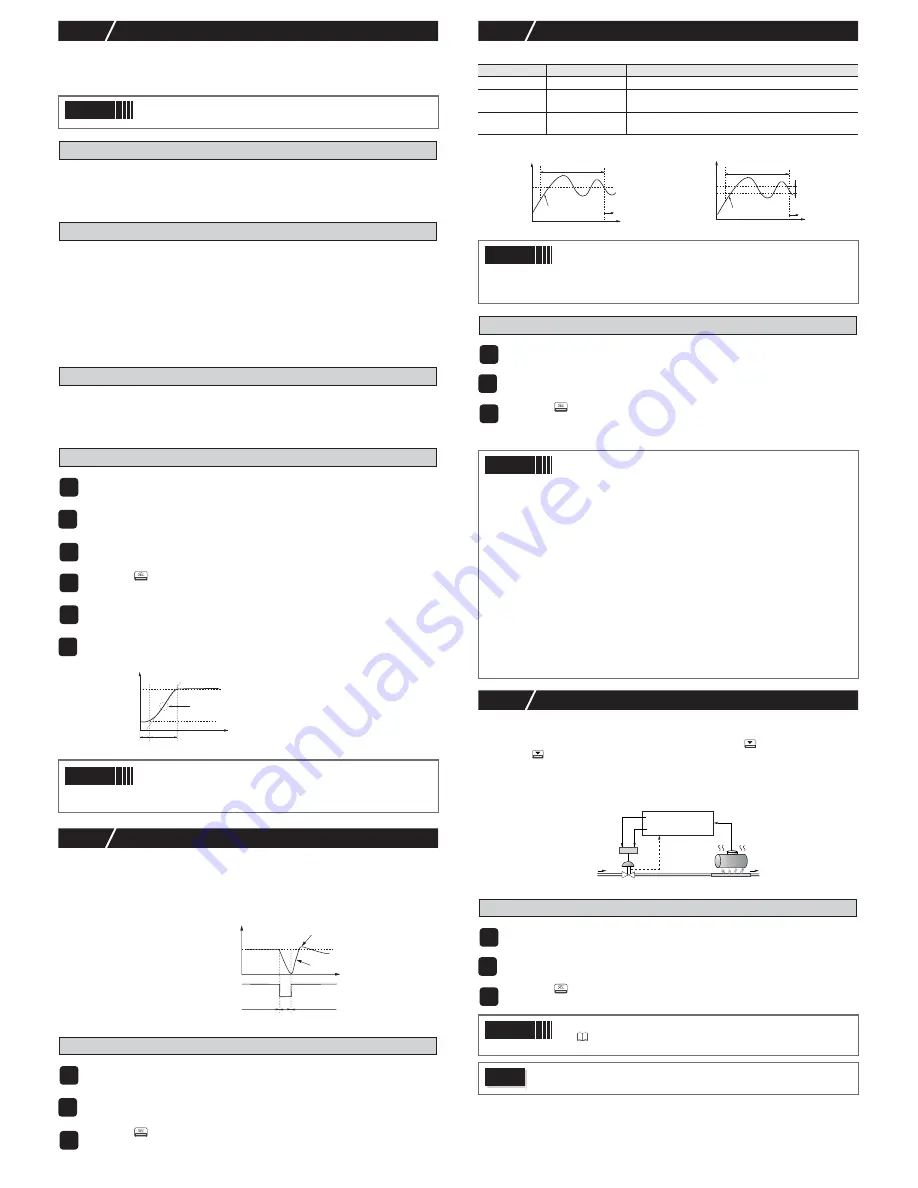
●
Normal type
●
Low PV type
Running auto-tuning
7-7
Valve Control (Servo Control 1 / Serve Control 2)
Valve controls adjust and control the valve position according to [OPEN] and [CLOSE] of the
contact signal.
Turn on the contact outputs in manual mode, so that pressing the
key means "OPEN", and
pressing the
key means "CLOSE"
Servo control 1 and servo control 2 have the following differences.
•
Servo Control 1: No valve position display
•
Servo Control 2: Has valve position display
Neither control can be used to control the valve position itself.
Setting Servo Control 1 or Servo Control 2
Point
When a high level of control is required, choose PID control, fuzzy PID
control, or PID2 control.
1
Turn on power of the controller and set the SV.
2
Display the system menu ("
SYS [h
7
").
3
Display the controller parameter ("
[trL
") and choose self-tuning ("
SELF
").
4
Press the
key to set the value.
5
Turn off power of the controller.
6
Turn on power of the control target equipment and the controller. Turn on
power of the control equipment first.
Self-tuning will begin.
Point
•
The equipment will not tune correctly if power of the controller is
turned on first.
•
To reset self-tuning, set the control method to PID ("PiD") once
before changing back to self-tuning.
1
Display the system menu ("
SYS Ch 7
").
2
Display the control parameter ("
CTrL
") and choose PID2 ("
Pid2
").
3
Press the
key to set the value.
dead time
t
process value
tuning
SV
lag time
suppress overshoot
ON
OFF
control equipment power
t
SV
process value
control loop
close
close
open
PV
"
At
" set value
Behavior
Function
"
oFF
"
Stop/Finish
Stops or finishes auto-tuning.
"
on
"
Normal type
The standard auto-tuning for SV reference. Choose this
auto-tuning in most situations.
"
Lo
"
Low PV type
Auto-tuning for SV-10% reference. Choose this when you
want to suppress the overshoot when tuning.
Point
Set the following parameters before running auto-tuning.
•
PV input type / PV input upper limit / PV input lower limit / Decimal
position / PV input filter in the setup channel menu ("
SET Ch
6
")
•
OUT1 proportion cycle (OUT2 proportion cycle) in the PID channel
menu ("
Pid Ch 2
").
1
Display the operation menu ("
oPE [h 1
").
2
Display auto-tuning ("
At
") and choose the tuning type.
Choose the standard type ("
on
") or low PV type ("
Lo
") according to the control target.
3
Press the
key to start auto-tuning.
A decimal point will blink at the bottom of the display during auto-tuning.
When auto-tuning has successfully competed, blinking decimal point will turn off and
overwrites the PID.
Point
•
PID parameter which is set after auto tuning has finished normally
will be maintained even when the power is turned off. However, the
PID value will not be changed if the power is turned off during auto-
tuning. In this case, rerun auto-tuning.
•
The equipment will use ON/OFF (2 position) control during auto-
tuning, so there may be a large change in PV according to the pro-
cess. Do not use auto-tuning for processes that do not permit a
large change in PV. Do not use auto-tuning for processes such as
pressure control and flow control that have a fast response.
•
Auto-tuning is not behaving normally if it has not finished after four
or more hours have passed. In these cases, recheck parameters
such as input/output wiring, control output behavior (normal/
reverse), and input sensor type.
•
Rerun auto-tuning if there is a large change in SV, a change in the
PV input type, or a change in the control target conditions that
reduces the effectiveness of the controls.
•
You can run auto-tuning when the control type is set to "fuzzy" or "PID2".
•
You cannot run auto-tuning in manual mode.
•
When using the PID selection function, the auto-tuning result for
the selected PID group is stored.
•
Auto tuning is forcibly terminated when SV changes because of
the ramp soak function, remote SV function, or ramp SV.
1
Display the system menu ("
SYS Ch 7
").
2
Display the control parameter ("
PrCS
") and choose servo control 1 ("
Srv1
").
This chooses "Servo Control 1".
3
Press the
key to set the value.
Point
•
Adjustments must be made to display the valve opening position.
"7-8 Position Feedback Control (PFB Control) (page 12)
•
An interlock function is built in.
Caution
Chattering may occur if the dead band ("
PGAP
") in the PFB menu ("
PFB Ch10
")
is set too small.
PV
t
process value AT start
AT calculating
PID control
SV
PV
t
process value AT start
AT calculating
PID control
SV
SV-10%FS
Valve
OPEN contact output
CLOSE contact output
Valve opening
(servo 2/PFB)
set value input
(temperature)
boiler
Valve motor
(servo 1)







































































