


















C141-E110-02EN
6 - 18
(3)
Full hit (hit all)
All requested data are stored in the data buffer. The disk drive starts transferring the requested
data from the address of which the requested data is stored. After completion of command, a
previously existed cache data before the full hit reading are still kept in the buffer, and the disk
drive does not perform the read-ahead operation. If the disk drive receives a full hit command
while performing the read-ahead operation, the disk drive starts transfering the requested data
without stopping the read-ahead operation.
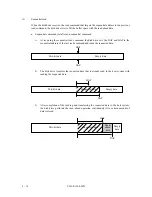
1) In the case that the contents of the data buffer is as follows for example and the previous
command is a sequential read command, the disk drive sets the HAP to the address of which
the hit data is stored.
HAP (set to hit position for data transfer)
Last position at previous read command
Last position at previous read command
Cache data
Full hit data
Cache data
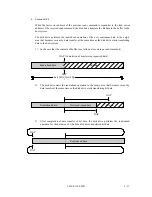
2) The disk drive transfers the requested data but does not perform the read-ahead operation.
(stopped)
HAP
Cache data
Full hit data
Cache data
(4)
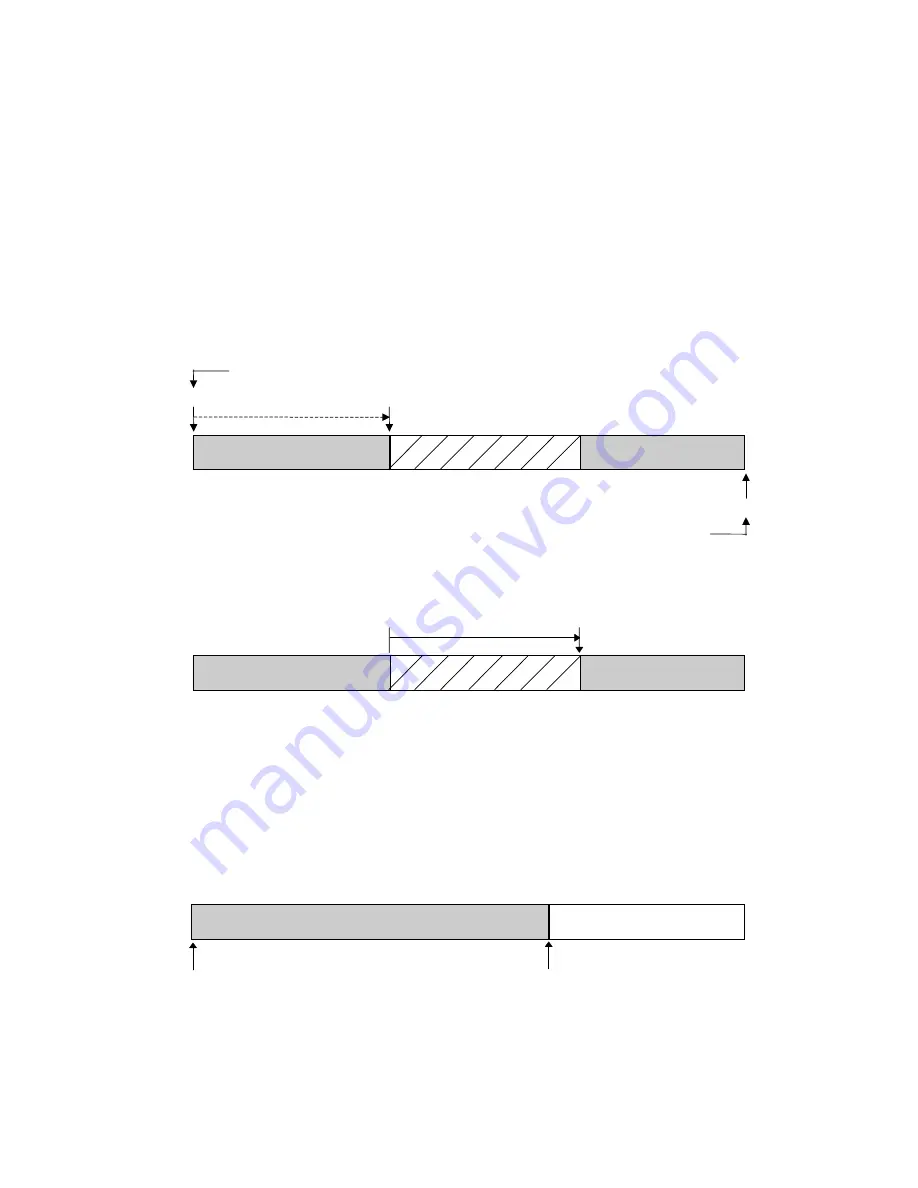
Partially hit
A part of requested data including a lead sector are stored in the data buffer. The disk drive starts
the data transfer from the address of the hit data corresponding to the lead sector of the requested
data, and reads remaining requested data from the disk media directly.
Following is an example of partially hit to the cache data.
Last LBA
Cache data
DAP
HAP
Start LBA
Summary of Contents for MPG3xxxAT
Page 1: ...C141 E110 02EN MPG3xxxAT DISK DRIVES PRODUCT MANUAL ...
Page 3: ...This page is intentionally left blank ...
Page 15: ...This page is intentionally left blank ...
Page 31: ...C141 E110 02EN 3 2 Figure 3 1 Dimensions ...
Page 47: ...This page is intentionally left blank ...
Page 67: ...This page is intentionally left blank ...
Page 177: ...This page is intentionally left blank ...
Page 201: ......







































































