



























2. HORIZONTAL MODE
2-8
2.5
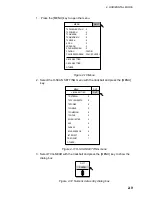
Finding Range and Bearing to a Target
Operate the trackball to place the trackball mark on the target you want to
measure the range and bearing. The range, bearing and depth to the target
appear at the upper left corner of the screen.
B
Trackball mark
î
è
ê
TRACKBALL DATA
î
Slant range
è
Horizontal range
ê
Depth
B Relative or
True bearing*
*True bearing requires
appropriate sensor.
34
°
56.789N
123
°
45.678E
Trackball mark
position
Figure 2-8 Location of trackball data
2.6 Eliminating
Weak
Echoes
Echoes from targets such as bottom and fish return to the transducer in order of
distance to them, and when we compare their intensities at the transducer face,
those from nearer targets are generally stronger when their reflecting properties
are nearly equal. The sonar operator will be quite inconvenienced if these
echoes are directly displayed on the screen, since he can not judge the actual
size of the target from the size of echoes displayed on the screen. To overcome
use the TVG function. It compensates for propagation loss of sound in water;
amplification of echoes on short range is suppressed and gradually increased as
range increases so that similar targets are displayed in the similar intensities
irrespective of the ranges to them.
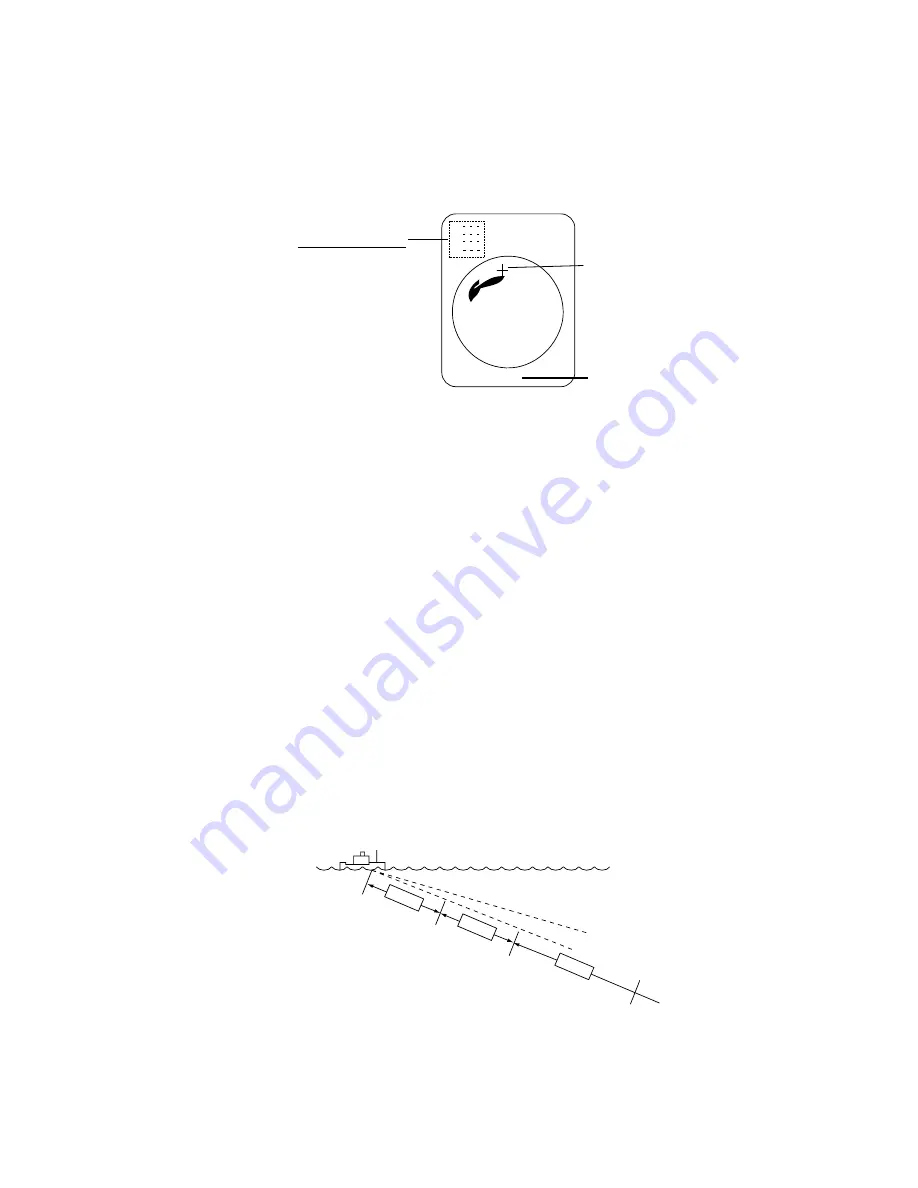
The FSV-24 has three TVG functions, NEAR, MEDIUM and FAR, and they
mainly compensate for propagation loss on short, middle and long ranges
respectively, centered at the ranges shown below. The higher the TVG setting
the greater the amplification of echoes.
About 100 m
Near
Far
Med
About 400 m
About 800 m
Figure 2-9 Principle of TVG
The TVG is also used to suppress unwanted echoes and noise which appear in
Summary of Contents for FSV-24
Page 1: ...COLOR SCANNING SONAR FSV 24 ...
Page 12: ...This page is intentionally left blank ...
Page 112: ...This page is intentionally left blank ...
Page 126: ...This page is intentionally left blank ...
Page 144: ...This page is intentionally left blank ...
Page 162: ...This page is intentionally left blank ...























































