Garmin G5 User's Manual
190-02072-00 Rev. B
69
Installation Manual
Installation Manual
Pilot's Guide
Index
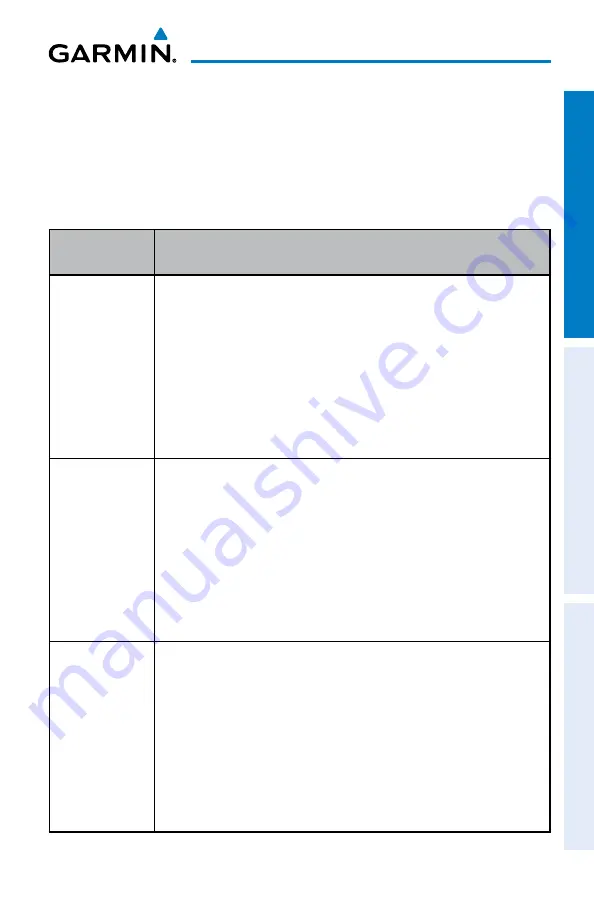
Yaw Damper Configuration Page
The installer needs to make the following yaw damper configuration selections
when setting up the GSA 28 based autopilot system. All selections are available in
configuration mode using the Yaw Damper page. Selections available in the normal
mode Setup menu are noted with an asterisk in Table 1-16.
Table 1-16 Yaw Damper Configuration Settings
Configuration
Setting
Description
Maximum
Torque*
The GSA 28 yaw damper has a configurable maximum torque
setting. This determines how much torque the servo will output
before the electronic slip clutch begins to slip.
The Maximum Torque setting should be set high enough to not slip
during in-flight air loading, but low enough for the pilot to override
the autopilot if required.
The Maximum Torque setting can be adjusted from 15% to 100%
in 5% steps.
Servo Gain*
The GSA 28 yaw damper has a configurable servo gain setting. This
determines how aggressively the yaw servo will move the rudder
surface.
The Servo Gain should be set high enough to dampen the yaw
rates, but low enough to avoid being overly aggressive in the rudder
movements.
The servo gain setting can be adjusted from 0.00 to 10.00 in steps
of 0.05.
Servo Direction
The GSA 28 yaw damper has a configurable servo direction.
The Servo Direction should be set to Normal if a clockwise
movement of the servo arm causes a nose left rudder movement.
The Servo Direction should be set to Reverse if a counterclockwise
movement of the servo arm causes a nose left rudder movement.
After selecting the proper servo direction, the installer should
engage the yaw damper in normal mode and verify proper rudder
response by the tail of the aircraft back and forth.