





























190-01115-01
G3X/G3X Touch Installation Manual - LRU Pinouts
Rev. AC
Page 25-53
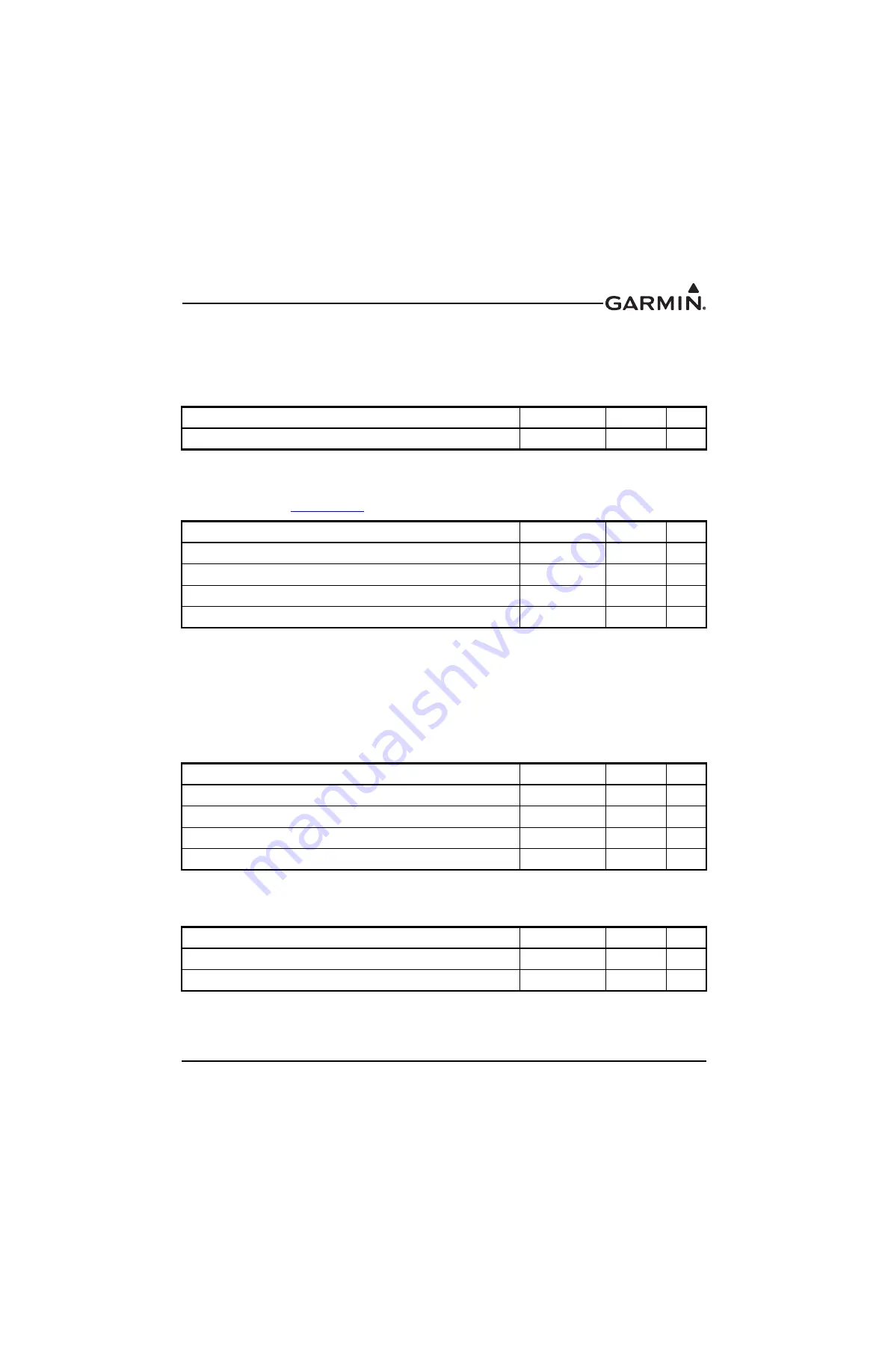
25.12.3 AP Disconnect
AP Disconnect should be connected to an active low push-button switch that disengages the autopilot, and
optionally engages it, if configured. Press and hold the switch to allow for control wheel steering by
disengaging the clutch and servo motor. The AP Disconnect input must be connected to both the pitch and
the roll servos, and can optionally be connected to the yaw damper servo.
25.12.4 CAN Bus
This data bus conforms to the BOSCH standard for Controller Area Network 2.0-B. This bus complies
with ISO 11898. See
for CAN Bus details.
25.12.5 ID STRAP
The ID Strap inputs are used to configure the GSA 28 as a roll, pitch, or yaw servo by installing a jumper
wire or not installing a jumper wire per the following:
Roll Servo: No jumper wire installed
Pitch Servo: Jumper wire installed from pin 5 to pin 8
Yaw Servo: Jumper wire installed from pin 6 to pin 7
25.12.6 RS-232
Pins 7 and 8 (TX and RX) connect to the GMC 30X RS232 channel 2 on the ROLL SERVO ONLY.
Pin Name
Connector
Pin
I/O
AP_DISCONNECT
J281
15
In
Pin Name
Connector
Pin
I/O
CAN_H
J281
1
I/O
CAN_L
J281
2
I/O
CAN_TERM_1
J281
3
--
CAN_TERM_2
J281
4
--
Pin Name
Connector
Pin
I/O
ID_STRAP_1
J281
5
In
ID_STRAP_2
J281
6
In
ID_STRAP_3/(RS-232 TX for Roll Servo Only)
J281
7
In
ID_STRAP_4/(RS-232 RX for Roll Servo Only)
J281
8
In
Pin Name
Connector
Pin
I/O
ID_STRAP_3/(RS-232 TX for Roll Servo Only)
J281
7
Out
ID_STRAP_4/(RS-232 RX for Roll Servo Only)
J281
8
In




























































