





























41
12. Heading Lock Gyro „GU 211“
Product Description:
This gyro is a compact stabilising system that detects position changes with an MEMS sensor. Integrated electronics control
a subsequent servo to counter position changes. Due to the compact construction and the low weight, this system is also
ideal for smaller model helicopters with electric drive.
The gyro can be operated in normal mode or AVCS mode (Angular Vector Control System).
In normal mode, correction of the subsequent servo is only performed as long as the model’s rotary motion is also recognised
by the gyro.
In the AVCS mode (Head Lock-Modus), the subsequent servo is only corrected until the original position (angle) of the gyro
is reached again.
The gyro effect can be set and adjusted or switched via the transmitter.
Performance characteristics:
• MEMS- (Micro Electro Mechanical System) rotting rate sensor and (Angular Vector Control System) mode
• Integrated temperature compensation
• Normal and heading hold (AVCS) mode with external sensitivity setting
• Digital signal processing
• Programming via the „SET“ button
• Suitable for analogue and digital servos
Caution, important!
The gyro is not compatible with the servos Futaba S9251, S9256, BLS251 and JR-2700G, 8700G, 810G.
If you want to operate the gyro with an analogue servo, connect the servo only after switched it to analogue
servos in programming mode. If you do not perform the change and the gyro is set to digital servos, there is a
great danger of quickly destroying the analogue servo.
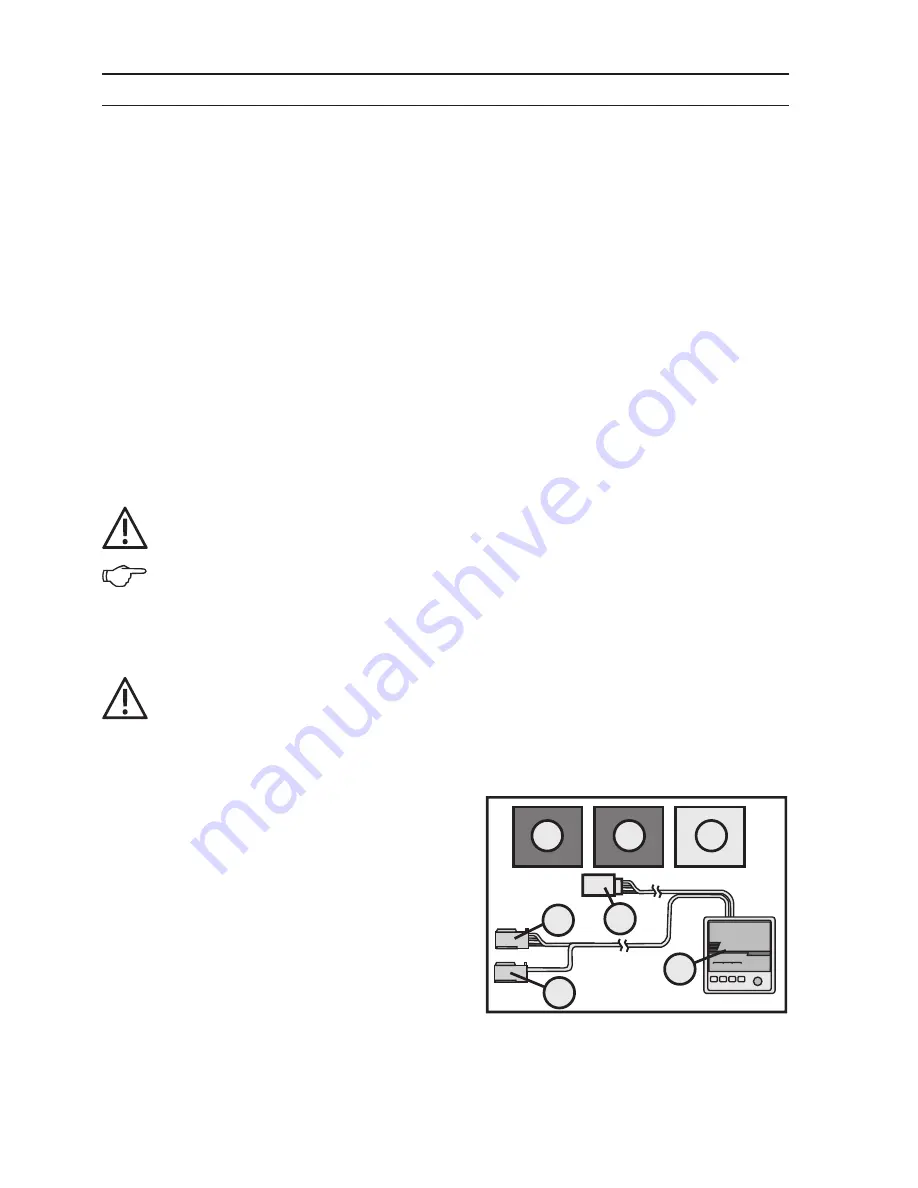
Connections and Accessories
Attention, important!
Do not launch your gyro before you have read the following sections in full and know what must be observed
during installation and operation. This is the only way to prevent malfunction or even damage.
The gyro is connected to the receiving output for the tail servo. The tail servo in turn is connected directly to the gyro
system. This means that the gyro is switched between the receiver and the tail servo. Additionally, the gyro is connected to
another receiver output that is later used for sensitivity control.
1. Gyro
2. Receiver connection for gyro sensitivity
3. Receiver connection for the tail servo
4. Connection plug for the tail servo
5. Two double-sided adhesive tapes
6. Metal plate
2
3
4
5
5
6
S
1
2
3
SET
GAUI
GU-211
QUEC
GYRO
1
Figure 1
Summary of Contents for Hurricane 425
Page 102: ...102 ...
Page 103: ...103 ...







































































