



















1-1. Comparison of starting systems
There are numerous applications where soft starting and limited
current peak are needed and thereby making direct starting of
squirrel-cage motors impossible. Traditionally in such cases other
types of starting with reduced stator voltage have been resorted to. The
best-known are star-delta starters, autotransformer starters, stator
resistance starters or using part winding motors.
Any reduced starting voltage imposes a current limitation, and as a
consequence the starting torque is also reduced, but there will always
be peaks during the change from one point or state to another which
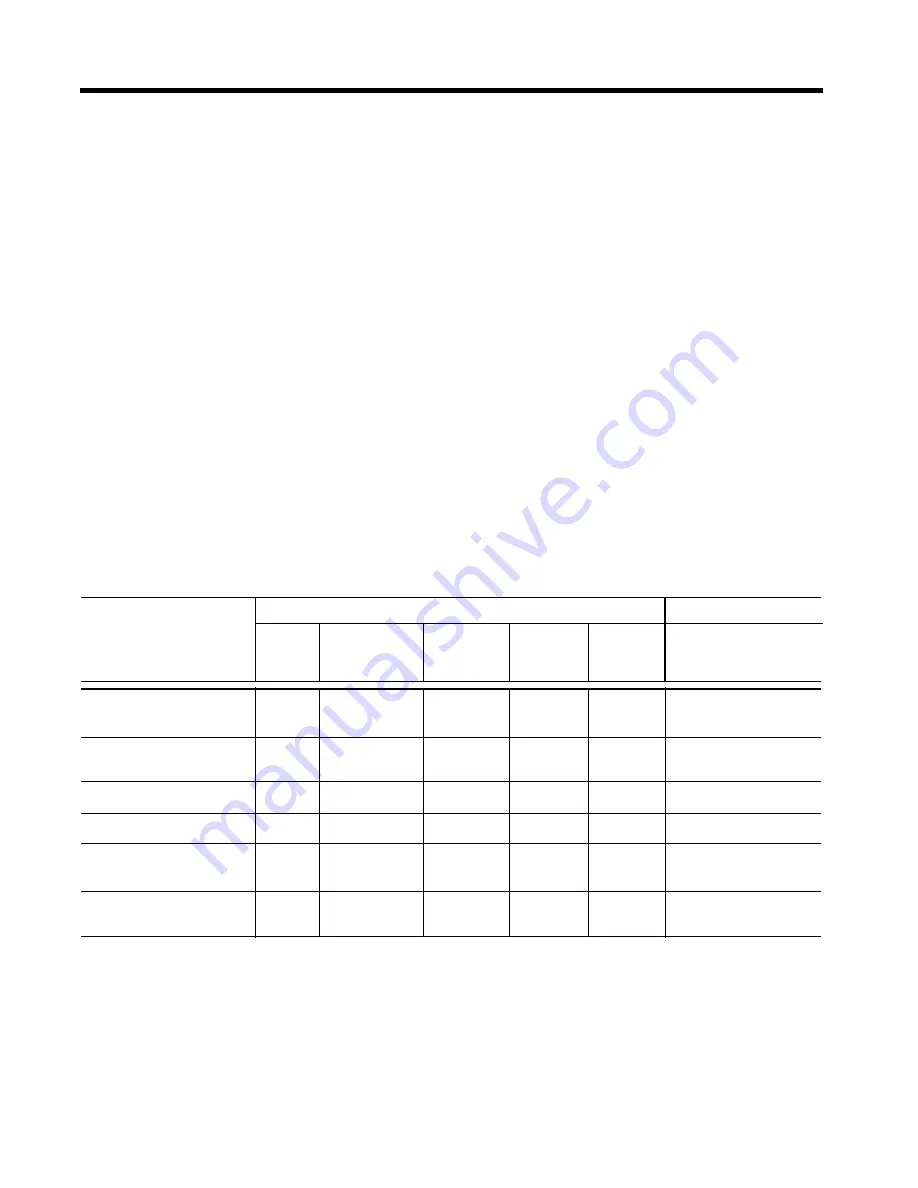
can damage the machine being driven. In order to analyse the
performances offered by each of these different types of starters, the
following table shows the special characteristics of each of them,
comparing with the ASTAT system.
Note that in general all reduced voltage starts produce a reduction in
torque in squared proportion to the current in the phases of the motor
(not on the line) and the latter in turn is reduced in linear proportion to
the voltage. From this it can be deduced that any start with reduced
voltage reduces the torque in squared proportion to the voltage per
motor phase. From this point of view soft starting produces, just like any
other reduced voltage start, a reduction in starting torque, according
% of direct start
100%
30 - 40 or 64%
58 - 70%
65%
33%
Depending on adjust,
current (in the line)
max. 90%
% of direct start torque
100%
30 - 40 or 64%
33 - 49%
48%
33%
Depending on adjust,
max. 90%
Starting steps (1)
1
4, 3 or 2
3 or 2
2
2
Continuous, no steps
Connections to motor
3
3
3
6
6
3
Line overload
5 In
1,5 - 2,1 or 3,2 In
3 - 3,5 In
3,25 In
1,65 In
Depending on adjust,
(approx.)
max. 4-7 In
Change or
NO
NO
NO
NO
YES
NO
starting pause
(1) "Steps" mean sharp changes of speed during the time from rest until rated speed is reached.
to the adjusted parameters. The advantage, of course, is the ease with
which this ramp can be controlled to produce a soft start in accordance
with the actual requirement of the machine.
From the comparison table it can be seen that the maximum starting
torque attainable using the soft system is 90% of that which direct
starting tends to. Bearing in mind that the direct starting torque varies
between 1.5 and 2.4 times rated torque, it can be deduced that with the
soft starter, starting torques which are somewhat higher than rated are
obtained.
This area includes the starting of pumps, fans, conveyor belts, etc.,
where a torque in the region of 60% of rated is usually sufficient for
correct starting.
As a general rule it can be guaranteed that soft starter will allow starting
of drives which are currently used in conventional starting systems,
with the advantages outlined, and above all the facility to adjust the
current peaks and torque at the machine, faced with the impossibility
or difficulty of varying the steps in conventional systems.
1. Generalities
1-1
CONVENTIONAL STARTERS
SOFT STARTER
Direct
Autotransfo
Stator
Part
resistance
winding
Star-delta
motor







































































