





























5-168
B30 BUS DIFFERENTIAL SYSTEM – INSTRUCTION MANUAL
FLEXLOGIC
CHAPTER 5: SETTINGS
5
specified operators to create an output. The final output of an equation is a numbered register called a virtual output.
Virtual outputs can be used as an input operand in any equation, including the equation that generates the output, as a
seal-in or other type of feedback.
A FlexLogic equation consists of parameters that are either operands or operators. Operands have a logic state of 1 or 0.
Operators provide a defined function, such as an AND gate or a Timer. Each equation defines the combinations of
parameters to be used to set a Virtual Output flag. Evaluation of an equation results in either a 1 (=ON, or flag set) or 0
(=OFF, or flag not set). Each equation is evaluated at least four times every power system cycle.
Some types of operands are present in the relay in multiple instances, for example contact and remote inputs. These types
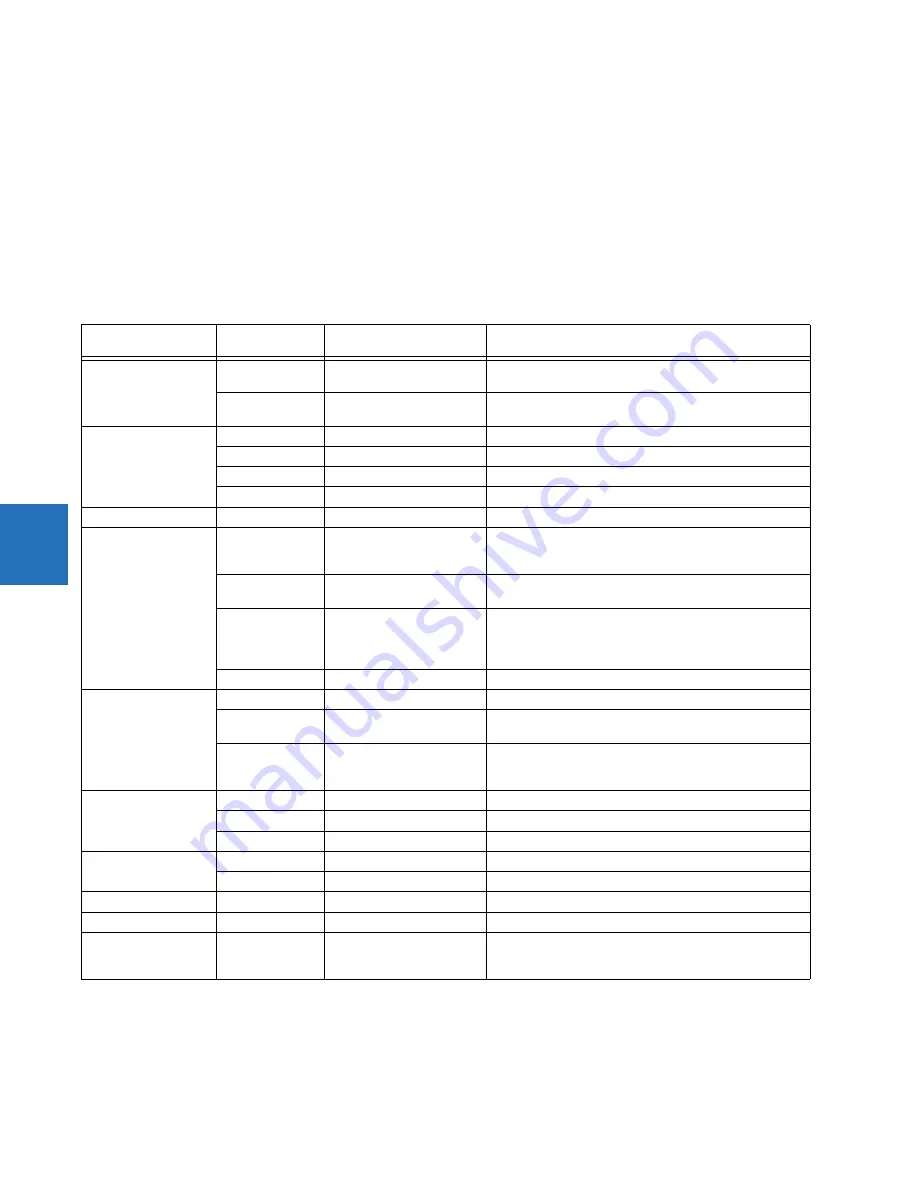
of operands are grouped together (for presentation purposes only) on the front panel display. The table lists characteristics
of the different types of operands.
Table 5-19: B30 FlexLogic operand types
The following table lists the operands available for the relay. The operands can be viewed online by entering the IP address
of the relay in a web browser and accessing the Device Information Menu.
Operand type
State
Example of format
Characteristics
[Input Is ‘1’ (= ON) if...]
Contact Input
On
Cont Ip On
Voltage is applied presently to the input (external contact
closed)
Off
Cont Ip Off
Voltage is not applied presently to the input (external
contact open)
Contact Output
(type Form-A contact
only)
Contact Closed
Cont Op 1 Closed
Contact output is closed
Current On
Cont Op 1 Ion
Current is flowing through the contact
Voltage On
Cont Op 1 VOn
Voltage exists across the contact
Voltage Off
Cont Op 1 VOff
Voltage does not exist across the contact
Direct Input
On
DIRECT INPUT 1 On
The direct input is presently in the ON state
Element
(Analog)
Pickup
PHASE TOC1 PKP
The tested parameter is presently above the pickup setting
of an element that responds to rising values or below the
pickup setting of an element that responds to falling values
Dropout
PHASE TOC1 DPO
This operand is the logical inverse of the above PKP
operand
Operate
PHASE TOC1 OP
The tested parameter has been above/below the pickup
setting of the element for the programmed delay time, or
has been at logic 1 and is now at logic 0 but the reset timer
has not finished timing
Block
PHASE TOC1 BLK
The output of the comparator is set to the block function
Element
(Digital)
Pickup
Dig Element 1 PKP
The input operand is at logic 1
Dropout
Dig Element 1 DPO
This operand is the logical inverse of the above PKP
operand
Operate
Dig Element 1 OP
The input operand has been at logic 1 for the programmed
pickup delay time, or has been at logic 1 for this period and
is now at logic 0 but the reset timer has not finished timing
Element
(Digital Counter)
Higher than
Counter 1 HI
The number of pulses counted is above the set number
Equal to
Counter 1 EQL
The number of pulses counted is equal to the set number
Lower than
Counter 1 LO
The number of pulses counted is below the set number
Fixed
On
On
Logic 1
Off
Off
Logic 0
RxGOOSE Boolean
On
RxGOOSE Boolean 1 On
The RxGOOSE Boolean is presently in the ON state
Virtual Input
On
Virt Ip 1 On
The virtual input is presently in the ON state
Virtual Output
On
Virt Op 1 On
The virtual output is presently in the set state (that is,
evaluation of the equation that produces this virtual output
results in a "1")
Summary of Contents for b30
Page 10: ...x B30 BUS DIFFERENTIAL SYSTEM INSTRUCTION MANUAL TABLE OF CONTENTS ...
Page 486: ...5 278 B30 BUS DIFFERENTIAL SYSTEM INSTRUCTION MANUAL TESTING CHAPTER 5 SETTINGS 5 ...
Page 616: ...iv B30 BUS DIFFERENTIAL SYSTEM INSTRUCTION MANUAL ABBREVIATIONS ...
Page 632: ...xvi B30 BUS DIFFERENTIAL SYSTEM INSTRUCTION MANUAL INDEX ...






































































