








LCD
GRAPHIC
FACTORY
FUNCTION
DISPLAY
SETTING
DESCRIPTION
SETTING
6-11
* 28
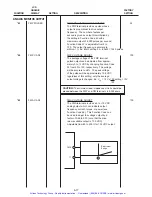
SLIP COMP
SLIP COMPENSATION
0.0
Slip compensation provides a means of
improving speed accuracy without employing
speed feedback (i.e. open-loop method). It
does this by adjusting output frequency as a
function of load and can be expected to im-
prove speed fluctuations to within 1/3 of
normal slip. Adjustable from -9.9 Hz to +5 Hz.
NOTE:
Function Code 29 setting will affect this
Function Code.
Example: A 4 pole motor is nameplated at a full load
speed of 1740 RPM for 60 Hz operation.
Therefore,
w
sync
= 60 Hz x 120 (Constant) = 1800 RPM
4 Poles
Slip = 1800 - 1740 = 0.0333
1800
Slip Freq = 0.0333 x 60 Hz = +2.0 Hz setting
at Function Code 28.
Note that slip compensation can also be less
than zero. A negative setting has the effect
of reducing speed fluctuations in the presence
of overhauling loads. A negative setting might
also be used when trying to get two motors with
a common shaft to load share better.
29
TRQ VECTOR
TORQUE VECTOR CONTROL
0
Sensorless torque vector control is a recently
developed control strategy which provides much of
the performance of AC flux vector drives without the
cost of an expensive motor mounted encoder. The
algorithm uses knowledge of motor parameters (see
Function Codes 90 through 92) to adjust voltage and
current in a way which optimizes motor torque under
all operating conditions.
0:
Inactive
1:
Active (SINGLE MOTOR APPLICATIONS ONLY)
NOTE: If this Function Code is set (i.e. active) it
will affect the following function codes as follows:
-Function Code 04 (Rated Voltage)
If “0” (Free) is set, the following will apply:
230 VAC Drives, 230 VAC maximum output
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com