
























Software
English, Revision 01, Date: 14.04.2009
11
6
Software
6.1
Monitor program
The terminal (PC with Hyperterm) has to be connected to the interpreter using the
socket in the middle (power supply and serial interface).
The parameters for the serial interface are:
38400,8,e,1,ANSI Terminalemulation.
The monitor will start after pressing
M
.
6.1.1
Main menu
The following menu appears:
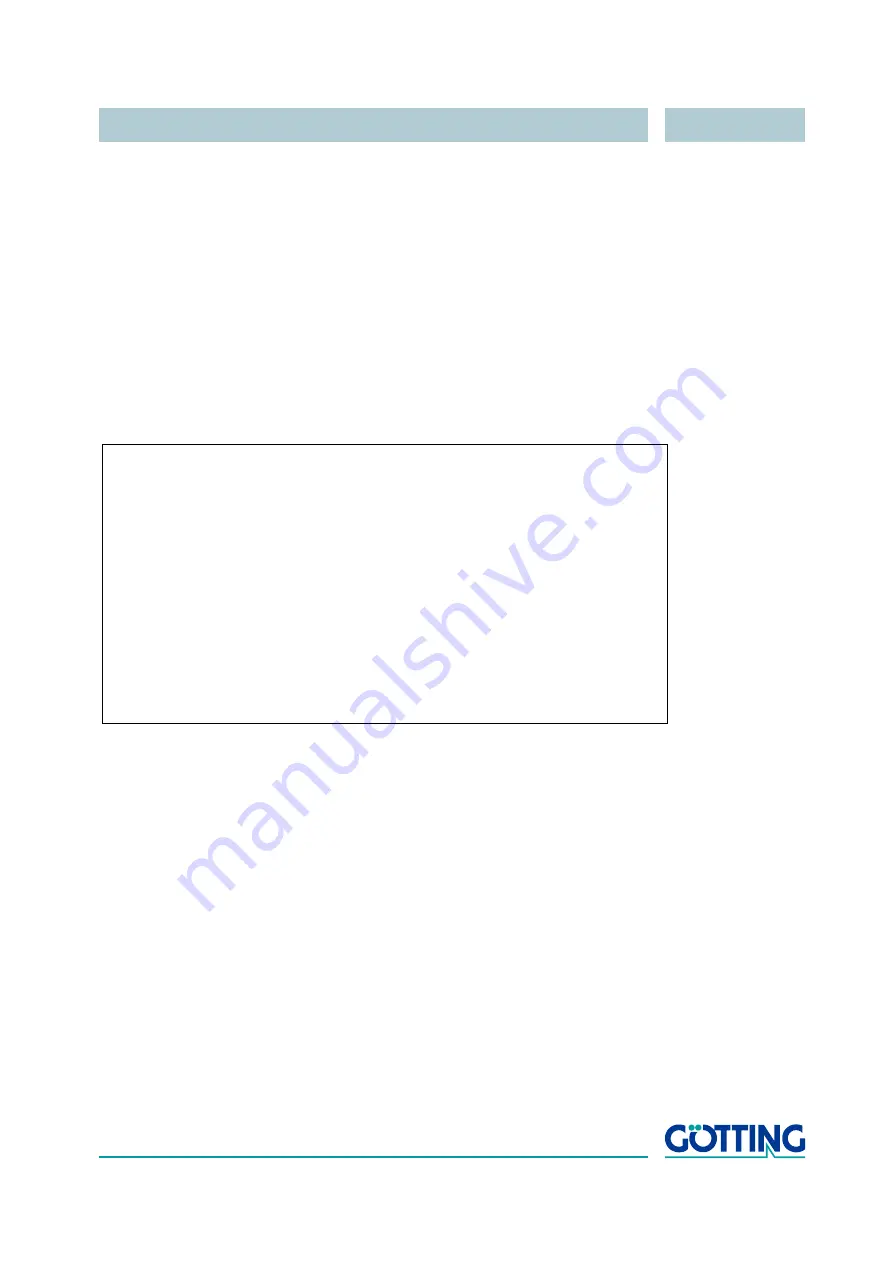
Figure 3
Screenshot: Main menu of the monitor program
The first two lines represent the input.
S1, S2, D1, D2
The values for
S1
,
D1
,
S2
, and
D2
are each the sum of the 16 samplings. The range
for the sum voltage is maximal 16 x 1024 = 16384 and for the difference voltage -
16 x 512 until +16 x 511 = -8192 until +8176
X1, X2
X1 and X2 present the calculated values for the collateral deviation of the antennas
above the guide wire in a range from -255 to +255 in mm. The value of the threshold
will be -256 if the corresponding voltages of S1 respectively S2 fall below the set
threshold.
Status
The hexadecimal output of binary coded system statuses in the same format as the
output in the serial telegram or in PDO_1.
S1: 1 D1: -10 S2: 10816 D2: -4403 X1:-256 mm X2: -50 mm Status: 0x40
(1) Select Antenna System 1
(2) Select Antenna System 2
(C)AN Menue
(L)oad Values to EEProm
(O)utput CSV-Data (press 'a' to abort)
(U)pdate Firmware
(S)ervicemenue
(Q)uit
Software Version 73350A01.05 / 15.MAR.2005 Serial Number: 9999999







































































