























Device Description HG G-84300ZC | English, Revision 08 | Date: 28.05.2020
29
CANopen® Interface – Chapter 7
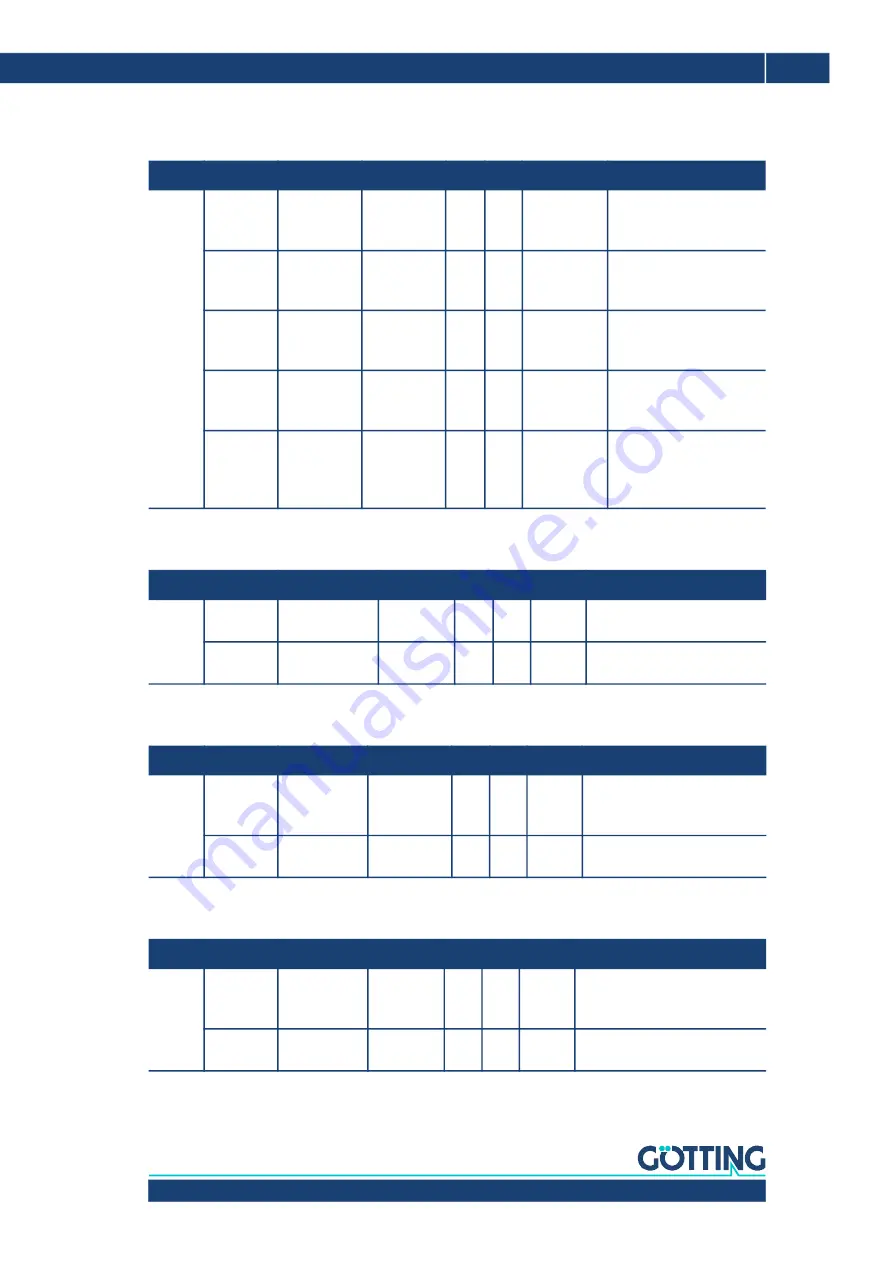
7.4.3.12 Mapping TxPDO_1
7.4.3.13 8 Bit Digital Input (transmitted in TxPDO 1)
7.4.3.14 16 Bit Analog Inputs (transmitted in TxPDO 1)
7.4.3.15 32 Bit Analog Inputs (transmitted in TxPDO 1)
Table 30
CANopen®: Mapping TxPDO_1
Index
Sub Index Name
Type
Attr. Map Default
Meaning
0x1A00 00
Number of
mapped
objects
Unsigned 8 RO
No
0x03
Number of sub indexes
01
1st mapped
object
Unsigned 32 RO
No
0x64030120 mapped to Index
0x6403,01 with 32 Bit
length (angle)
02
2nd mapped
object
Unsigned 32 RO
No
0x64010110 mapped to Index
0x6401,01 with 16 Bit
length (temperature)
03
3rd mapped
object
Unsigned 32 RO
No
0x60000108 mapped to Index
0x6000,01 with 8 Bit
length (Status)
04
4th mapped
object
Unsigned 32 RO
No
0x6F200108 mapped to Index
0x6F20,01 with 8 Bit
length
(transmission counter)
Table 31
CANopen®: 8 Bit Digital Input (transmitted in TxPDO 1)
Index
Sub Index Name
Type
Attr. Map Default Meaning
0x6000 00
number of 8 bit
inputs
Unsigned 8 RO
No
0x01
number of 8 bit inputs
01
8 bit digital
input
Unsigned 8 RO
Yes ./.
System state / TxPDO_1
Table 32
CANopen®: 16 Bit Analog Inputs (transmitted in TxPDO 1)
Index
Sub Index Name
Type
Attr. Map Default Meaning
0x6401 00
number of 16
bit analog
inputs
Unsigned 8 RO
No
0x01
number of 16 bit analog
inputs
01
32 bit analog
input
Unsigned 16 RO
Yes ./.
Temperature
Table 33
CANopen®: 32 Bit Analog Inputs (transmitted in TxPDO 1)
Index
Sub Index Name
Type
Attr. Map Default Meaning
0x6403 00
number of 32
bit analog
inputs
Unsigned 8 RO
No
0x01
number of 32 bit analog inputs
01
32 bit analog
input
Real 32
RO
Yes ./.
Angle
























































