





























58
Examples of different Dual Rate values:
Dual Rate / Expo
Switchable control characteristics for roll, pitch-axis and tail rotor
The Dual Rate / Expo function provides a means of swit-
ching to reduced control travels, and infl uencing the tra-
vel characteristics, for the roll, pitch-axis and tail rotor
servos (control functions 2 ... 4). This can be carried out
in fl ight by means of an external switch. A separate cur-
ve for control function 1 (motor / collective pitch) can be
set separately for throttle, collective pitch and tail rotor in
the »
Heli mixer
« menu. These curves feature up to fi ve
separately programmable points; see the section star-
ting on page 66 and also page 106.
Dual Rate
works in a similar way to transmitter control
travel adjustment in the »
Control set
t
ings
« menu, i.e.
it affects the corresponding stick function, regardless of
whether that function controls a single servo or multip-
le servos via any number of complex mixer and coup-
ling functions.
For each switch position the servo travels can be set to
any value within the range 0 to 125% of full travel.
Expo
works in a different way. If you set a value greater
than 0%, exponential provides fi ne control of the model
around the centre position of the primary control func-
tions (roll, pitch-axis and tail rotor), without forfeiting full
travel at the end-points of stick movement. If you set a
value lower than 0%, travel is increased around the neu-
tral position, and reduces towards the extremes of travel.
The degree of “progression” can be set within the ran-
ge -100% to +100%, where 0% equates to normal, line-
ar control characteristics.
Another application for exponential is to improve the li-
nearity of rotary-output servos, which are the standard
nowadays. With a rotary servo the movement of the con-
trol surface is inevitably non-linear, as the linear move-
ment of the output disc or lever reduces progressively as
the angular movement increases, i.e. the rate of travel of
the control surface reduces steadily towards the extre-
mes, dependent upon the position of the linkage point
on the output disc or lever. You can compensate for this
effect by setting an Expo value greater than 0%, with the
result that the angular travel of the output device increa-
ses disproportionately as stick travel increases.
Like Dual Rates, the Expo setting applies directly to the
corresponding stick function, regardless of whether that
function controls a single servo or multiple servos via
any number of complex mixer and coupling functions.
The Expo function can also be switched on and off in
fl ight if you assign a switch to it.
The Dual Rate and Expo functions can also be switched
on and off together if you assign a switch to the func-
tion. The result of this is that Dual Rates and Expo can
be controlled simultaneously using a single switch, and
this can be advantageous – especially with high-speed
models.
Basic set-up procedure
1. Hold the
SELECT
button pressed in, then use the
right-hand rocker button to select the desired line:
“Roll”, “Pitch-axis” or “Tail rotor”.
2. Use the right-hand rocker button to select
SEL
under
the DUAL or EXPO column, so that you can make
adjustments at that point.
3.
Press the
SELECT
button. The appropriate input fi eld
is now highlighted.
4. Set the desired value using the right-hand rocker but-
ton.
5. Press
SELECT
to conclude the input process and re-
turn to the function fi eld.
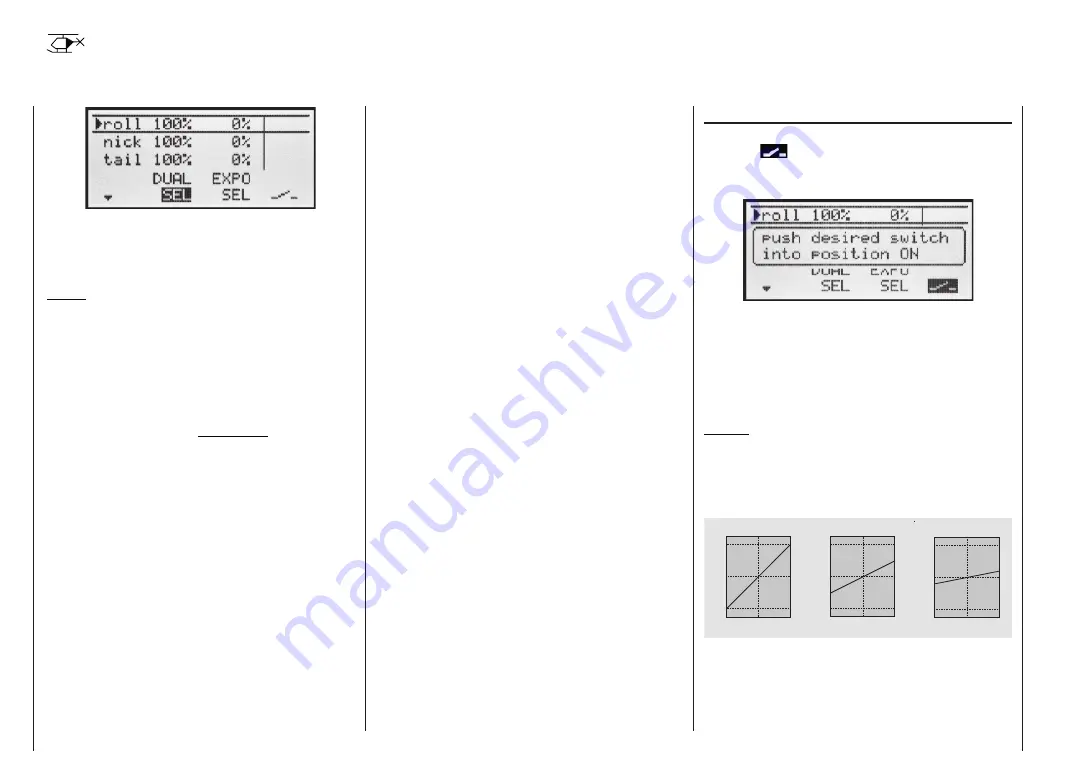
Dual Rate function
If you wish to switch between two possible D/R settings,
select the
symbol and assign a physical switch as
described in the section “Assigning switches and control
switches” on page 25.
Select the left-hand
SEL
fi eld to change the Dual Rate
value, and use the right-hand rocker button in the high-
lighted fi eld to set the values for each of the two switch
positions separately.
Pressing
CLEAR
in the highlighted fi eld resets an alte-
red value to 100%.
Caution:
The Dual Rate value should always be at least 20% of
total control travel, otherwise you could lose all control of
that function.
Dual Rate / Expo – Model helicopter
0
1 0 0
1 2 5
%
S
er
vo
T
ra
ve
l
®
S t i c k D e f l e c t i o n
®
+ 1 0 0 %
- 1 0 0 %
0
- 1 0 0
- 1 2 5
D u a l R a t e = 1 0 0 %
D u a l R a t e = 5 0 %
D u a l R a t e = 2 0 %
0
1 0 0
1 2 5
%
S
er
vo
T
ra
ve
l
®
S t i c k D e f l e c t i o n
®
+ 1 0 0 %
- 1 0 0 %
0
- 1 0 0
- 1 2 5
S
er
vo
T
ra
ve
l
®
S t i c k D e f l e c t i o n
®
+ 1 0 0 %
- 1 0 0 %
0
0
1 0 0
1 2 5
%
- 1 0 0
- 1 2 5
Summary of Contents for MX-16S
Page 1: ...1...
Page 17: ...17...
Page 31: ...31 Fixed wing models Installation and connections...
Page 35: ...35 Program description Reserving a new memory...
Page 47: ...47 Base settings Model helicopter...
Page 83: ...83 Fail safe...
Page 89: ...89 Programming examples Fixed wing model...
Page 109: ...109 Programming examples Model helicopter...
Page 112: ...112 112...
Page 116: ...116...







































































