























Gyro System
SRVS G490T
SRVS gyro system, Order No. 5137
3
rotational speed for any fluctuations, and increases or decreases the tail rotor servo
movement in order to maintain the rotational speed at a constant rate.
•
Designed for use with digital servos or the DS-8700G super-servo
One of the crucial factors in the performance of a gyro system is the characteristics of the
servo with which it is used. The high regulatory speed of this system is made possible by the
use of the Graupner/JR DS-8700G super-servo with its extremely fast response, high power
and ability to process control signals at much higher frequency than is possible with conven-
tional servos. The SRVS G490T can control standard, lower-cost servos, but we recommend
the use of the DS-8700G.
•
Variable servo travel limiting
This feature allows you to adjust the maximum servo travel to match the mechanical travel of
the tail rotor, and thereby avoid overloading the servo due to mechanical binding or stalling.
•
No temperature-dependent drift
The angular velocity sensor used in this gyro has zero inherent tendency to drift from its
nominal centre setting.
•
Integral gyro gain adjustment from the transmitter
The gain and direction of effect can be set from the transmitter, and this feature is built into
the electronic circuitry of the gyro system. This means that it is easy for the pilot to adjust the
system to obtain highly accurate and linear gyro gain which can be reproduced at any time,
and also to switch between "normal" and "heading lock" modes.
•
Lightweight angular velocity element with vibration isolation
Inside the gyro unit the sensor is electrically shielded, and mounted in a floating mechanical
suspension system. This mounting system absorbs up to 90% of the helicopter-specific vi-
brations to which the case is subjected.
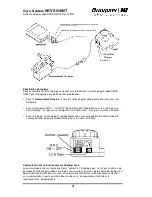
4. Connecting the gyro to the receiving system
The SRVS G490T gyro system features two connecting leads which are permanently attached
to the case:
•
The tail rotor servo (or the servo whose function is to be stabilised) is connected to the
socket using the three-core servo lead.
•
The four-core lead terminates in two plugs (black / white) which should be connected to the
receiver as follows:
The black plug is connected to the "tail rotor" receiver socket (normally channel 4). If the gyro
is required to stabilise a model around the lateral (elevator) or longitudinal (aileron) axis, this
plug must be connected to the corresponding receiver output socket (elevator or aileron).
•
Connect the white plug to the receiver output used to adjust gyro gain (normally channel 7).























































