
















Gyro System
SRVS G490T
Système de gyroscope SRVS G490T Réf. N°5137
6
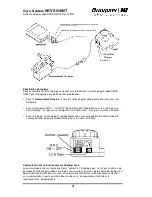
Les réglages ‘’fort’’ ou ‘’faible’’ de l’effet du gyroscope seront maintenant contrôlés.
Placer l’organe correspondant sur l’émetteur (Commutateur ou réglage proportionnel)
sur l’échange de l’effet du gyroscope de minimal à maximal. Vérifier alors si l’effet
change réellement de façon significative (plus grands ou plus petits débattements du
servo avec les pivotements de-ci, de-là du modèle)!
12. Réglage des caractéristiques de commande du rotor de queue (Dual-Rate, Exponentiel)
Valeurs de départ pour le mode de fonctionnement ‘’normal’’:
Normal
DR 60% EXP 40% Vol stationnaire
Voltige 1
DR100% EXP 60% Tour sur 540°
Voltige 2
DR 60% EXP 60% Tonneaux et autres figures
Note : Une réaction trop brutale à la commande du rotor de queue pourra être rendue
‘’souple’’ par l’augmentation de la proportion d’exponentiel.
13. Activation de la réduction de trim pour le rotor de queue (50%) avec les émetteurs mc-22 et
mc-24.
Le gyroscope SRVS G490T est un système de régulation de la vitesse angulaire qui améliore
la maniabilité même avec un fort effet du gyroscope. Même lorsque l’effet est réglé sur le
maximal, le rotor de queue suit exactement les débattements du manche de commande. Les
autres fonctions, comme par ex. les trims et les mixeurs qui sont éventuellement utilisés pour
le fonctionnement d’autres gyroscopes, devront être adaptés en correspondance. C’est
pourquoi il est conseillé de régler d’abord une valeur d’Expo un peu plus élevée jusqu’à ce
que l’on soit familiarisé avec le nouveau système.
14. Réglage du limiteur
Le limiteur est une butée électronique qui empêche une surcharge du servo lorsque la
transmission se bloque sur les positions mécaniques finales du rotor de queue. Il faudra
d’abord s’assurer que la limitation se fait symétriquement, donc des deux côtés avec le
même débattement du manche de commande, aux environs de la demi-course.
Le réglage correct pourra être vérifié en déplaçant le manche de commande lentement du
milieu vers la gauche ou la droite; aux environs de la moitié du débattement, le servo doit
stopper sur le limiteur et rester arrêté même avec d’autres mouvements du manche dans le
sens du plein débattement. Si la limitation se fait sur des amplitudes de débattement diffé-
rentes à droite et à gauche, la correction sera faite par le réglage du neutre du servo dans
l’émetteur, jusqu’à ce que la limitation soit symétrique. Monter alors le palonnier du servo sur
la position trouvée à 90° de la tringlerie, comme décrit dans le paragraphe (9).
La tringlerie de commande du rotor de queue sera connectée dans cette position du servo et
sa longueur sera réglée de façon à ce qu’une course mécanique égale soit à disposition des
deux côtés.
L’adaptation de la course du servo à la proportion mécanique de celle du rotor de queue
devra d’abord se faire largement au-dessus de la longueur du palonnier. Le système de gy-
roscope SRVS G490T comprend en supplément un potentiomètre de réglage pour le dé-
battement du servo avec le limiteur (= Course maximale du servo) qui facilite beaucoup de
réglage des données mécaniques.
Avec ce réglage, une réflexion est à faire en correspondance des priorités individuelles:
Une petite course de servo combinée avec un long palonnier de servo augmente la vitesse
de positionnement, mais réduit cependant la précision, l’absence de jeu et la résolution de la
commande du rotor de queue.
Une grande course de servo combinée avec un court palonnier de servo diminue la vitesse
de positionnement, mais augmente cependant la précision, l’absence de jeu et la résolution
de la commande du rotor de queue. Dans chaque cas, la tringlerie de commande du rotor de
queue sera montée sur les trous de connexions totalement extérieurs.
Choisir une distance comprise entre 12…16mm du point de pivotement sur le palonnier du
servo comme base pour le point de connexion. Placer le manche de commande du rotor de
queue à gauche et à droite sur le plein débattement et régler le potentiomètre ‘’Limit’’ à l’aide
d’un petit tournevis de façon à placer la limitation électronique des deux côtés, immé-
























































