





























DA98D User Manual
37
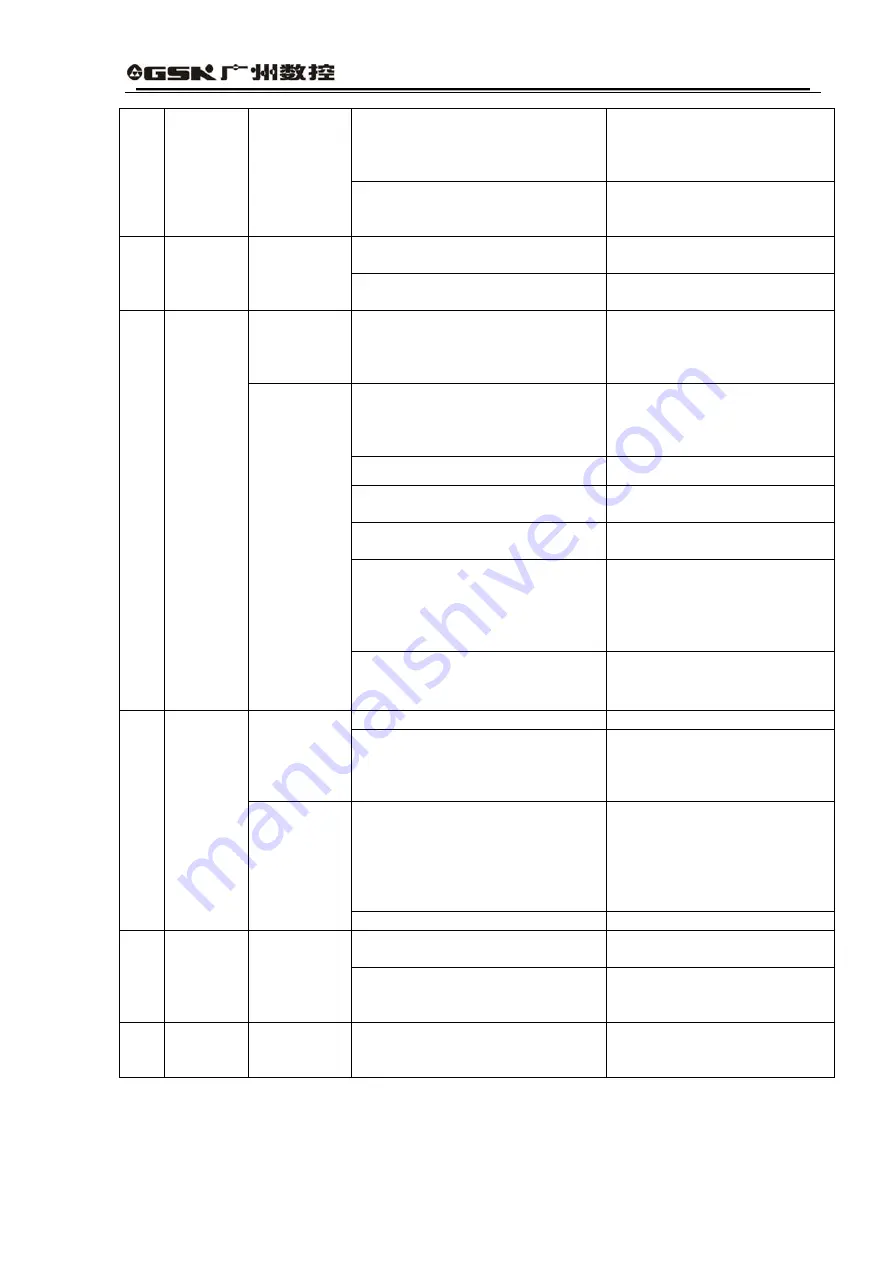
①
Failure in circuit board.
②
Power fuse is damaged.
③
Failure in soft start circuit.
④
Damaged rectifier.
Replace servo drive unit.
3
Voltage
Shortage
in Main
Circuit
Occur when
switching on
main power
supply
①
Excessively low power voltage.
②
Temporary power failure for
more than 20mS.
Examine the power supply.
①
Insufficient power capacity .
②
instantaneous power failure.
Examine the power supply.
3
Voltage
Shortage
in Main
Circuit
Occur during
motor
operation
Heat radiator overheating.
Examine load.
Occur when
switching on
control
power
Failure in circuit board.
Replace servo driver.
①
Wrong connection of motor leads
of U, V and W.
②
Wrong connection of encoder
cable leads.
Correct wiring.
Encoder failure.
Replace servo motor.
Set inspection range for position
excess.
Extend inspection range for
position excess.
Position proportion gain is too
small.
Increase the gain.
Insufficient torque.
①
Examine torque limiting
value.
②
Reduce loading capacity.
③
Replace it with drive unit and
motor of greater frequency.
4
Position
Excess
After
switching on
main power
supply and
control wire,
the motor
does not
work when
inputting
command
pulse
Excessively high command pulse
frequency.
Reduce the frequency.
Failure in circuit board.
Replace servo drive unit.
Occur when
switching on
control
power
①
Cable disconnection .
②
Internal temperature relay of
motor is damaged.
①
Examine cable.
Examine motor
②
.
Motor overload.
①
Reduce load.
②
Reduce start/stop frequency.
③
Reduce torque limiting value.
④
Reduce related gain.
⑤
Replace drive unit and motor
of greater frequency.
5
Motor
overheating
Occur during
motor
operation
Internal failure in motor.
①
Replace servo motor.
Motor gets stuck by the machinery. Examine machinery part of the
load.
6
Saturation
Failure of
Speed
Regulator
Occur during
motor
operation
Overload.
①
Reduce load.
②
Replace it with drive unit and
motor of greater frequency.
7
Abnormal
Drive
Stopping
Disconnection of CCW and CW
drive stopping input terminal.
Examine the wire connection
and power of the input
terminal.
Summary of Contents for DA98D
Page 1: ...DA98D Digital AC Servo Drive Unit User Manual V5 00 ...
Page 15: ...DA98D User Manual 4 Fig 1 1 Appearance of Servo Drive unit 2 Servo motor appearance ...
Page 16: ...DA98D User Manual 5 Fig 1 2 Servo Motor Appearance ...
Page 23: ...DA98D User Manual 12 Fig 3 1 Standard Wiring for Position Control Mode AM26LS32 Receiver ...
Page 24: ...DA98D User Manual 13 Fig 3 2 Standard Wiring for Speed Control Mode AM26LS32 Receiver ...
Page 71: ...DA98D User Manual 60 Installation Dimension Drawing for BS 120 Model ...
Page 72: ...DA98D User Manual 61 Installment Dimension Drawing for BS 200 Model ...
Page 73: ...DA98D User Manual 62 Installment Dimension Drawing for BS 300 Model ...
Page 74: ...DA98D User Manual 63 Installment Dimension Drawing for BD 80 Model ...
Page 75: ...DA98D User Manual 64 Installment Dimension Drawing for BD 120 Model ...







































































