





























GK600 User Manual
Chapter 5 List of Parameters
- 103 -
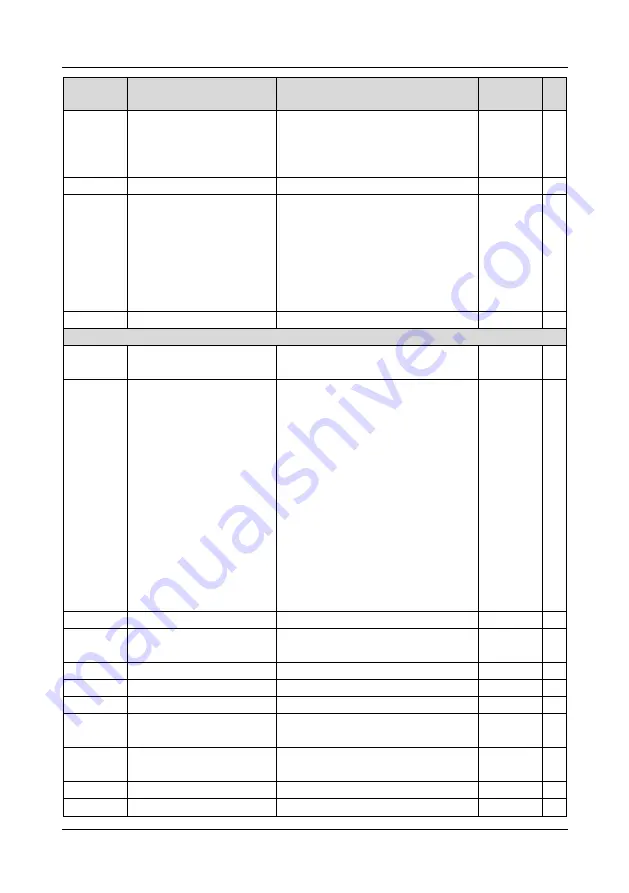
Parameter
Designation
Scope
Factory
default
Attr
Tens place: run direction (same as
F2-01)
Hundreds place: Accel/Decel time
option (same as F2-01)
F2-30 Run time of step 14
0.0s(min)~6000.0s(min)
0.0s
△
F2-31 Setting of step 15
Ones place: FREQ setting
0: Multi-step FREQ 15 (F1-17)
1~7: Same as F2-01
Tens place: run direction (same as
F2-01)
Hundreds place: Accel/Decel time
option (same as F2-01)
000
×
F2-32 Run time of step 15
0.0s(min)~6000.0s(min)
0.0s
△
Group F3 Wobble Frequency and Fixed Length Count
F3-00
Wobble FREQ function
setting
0: Wobble FREQ function disabled
1: Wobble FREQ function enabled
0
×
F3-01 Wobble FREQ run setting
Ones place: started method
0: Automatically
1: Started by terminal
Tens place: amplitude control
0: Relative to center FREQ
1: Relative to maximum FREQ
Hundreds place: wobble FREQ
memorized when stop
0: Memory enabled
1: Memory disabled
Thousands place: wobble FREQ
memorized on power loss
0: Memory enabled
1: Memory disabled
0000
×
F3-02 Pre-wobble FREQ
0.00Hz~600.00Hz
0.00Hz
△
F3-03
Pre-wobble FREQ holding
time
0.0s~3600.0s
0.0s
△
F3-04 Wobble FREQ amplitude 0.0%~50.0%
0.0%
△
F3-05 Hop FREQ
0.0%~50.0% (relative to F3-04)
0.0%
△
F3-06 Cycle of wobble FREQ
0.1s~999.9s
0.0s
△
F3-07
Triangular wave ramp-up
time
0.0%~100.0% (of wobble FREQ
cycle)
0.0%
△
F3-08 Length unit
0: m
1: 10m
0
△
F3-09 Length setting
0~65535
1000
△
F3-10 Pulse number per meter 0.1~6553.5
100.0
△







































































