




























GK600 User Manual
Chapter 6 Specification of Parameters
-
135 -
b1-02
Run direction
Range: 0~1
Factory default: 0
This parameter applies to run command controlled by control panel, and disabled under
terminal and communication control.
0: Forward
1: Reverse
b1-03
Reverse disabled
Range: 0~1
Factory default: 0
0: Reverse enabled
1: Reverse disabled
In some applications, reverse is likely to result in equipment damage. This parameter is used to
prevent reverse running.
b1-04
Dead time between
forward and reverse
Range: 0.0s ~ 3600.0s
Factory default:
0.0s
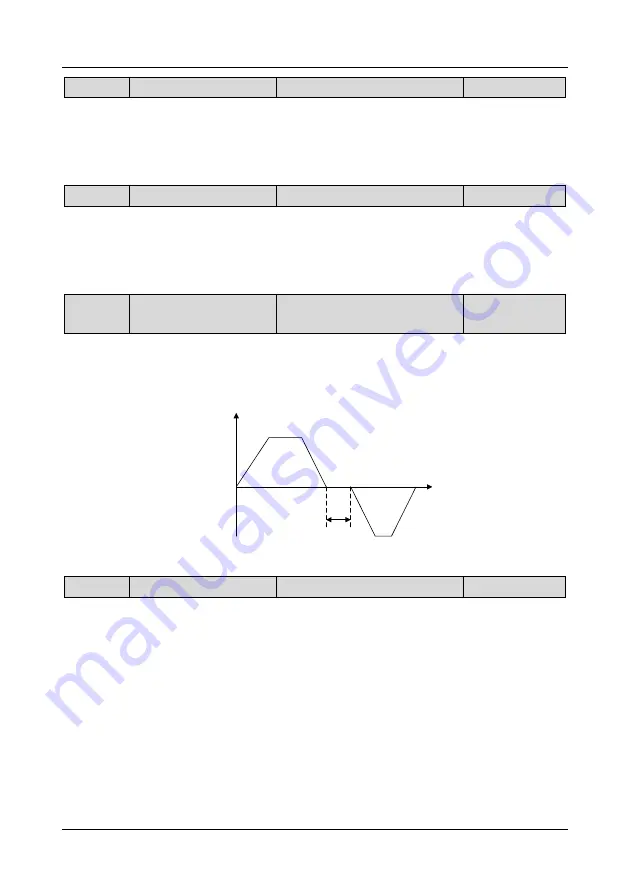
The dead time in 0Hz output during the transition from forward to reverse, or from reverse to
forward, is indicated by letter "t" in Fig. 6-11.
Fig. 6-11 Dead time between forward and reverse
b1-05
Start method
Range: 0~2
Factory default: 0
This parameter takes effect during the process of transition from stop status to run status.
0: From start frequency
When drive starts to run from stop status, it starts from start frequency (b1-06) and keeps this
frequency for a period of time set by b1-07, and then accelerated to set frequency in
accordance with the Accel method and time.
1: DC braking start
To make the motor stop completely before a new start, the drive will perform DC braking with
a certain period of time, as specified by b1-08 and b1-09, then start from start frequency
(b1-06), keeping a period of time as specified by b1-07, and then Accelerate to set frequency.
2: Flying start 1
3: Flying start 2
输出频率
时间
t
Output frequency
Time







































































