




























GK600 User Manual
Chapter 6 Specification of Parameters
-
183 -
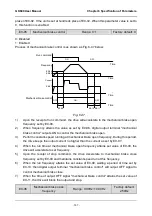
to bring about a bigger drive current and higher motor temperature.
Torque boost diagram is shown as Fig. 6-43:
Fig. 6-43
d1-10
Slip compensation gain
Range: 0.0%~400.0%
Factory default:
100.0%
Used under V/f control. When the motor is driving an electric-driven load, motor speed drops
with the increase of load. When the motor is driving a power generating load, motor speed will
increase with the increase of load. Appropriate slip compensation gain can maintain constant
motor speed when the motor load is changing.
To ensure the performance of slip compensation gain, setting motor rated speed d0-06 is
essential. The difference between d0-06 and the motor running speed without load is the rated
slip. Through real-time detection of motor load, slip compensation automatically adjusts the
drive output frequency on the basis of rated slip and motor load, reducing the impact of
changing load on motor speed.
Gain adjustment method: please make the adjustment around 100%. When motor is driving an
electric-driven load: if motor speed is relatively lower, the gain should be appropriately
increased; if motor speed is relatively higher, reduce the gain appropriately. When motor is
driving a power generating load: if motor speed is relatively lower, the gain should be
decreased; if motor speed is relatively higher, increase the gain appropriately.
Diagram of slip compensation gain is shown as Fig. 6-44 and 6-45.
0
输出频率(
Hz
)
输出电压(
V
)
电机额定频率
电机额定电压
提升量
Output frequency (Hz)
Output voltage (V)
Rated voltage of motor
Boost value
Rated frequency of motor







































































