



























GK600 User Manual
Chapter 6 Specification of Parameters
-
203 -
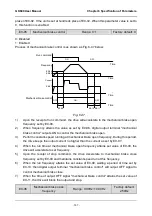
E
AI
A
I2
AI
1
AI
1
m
in
{
A
I1
,
A
I2
}
m
ax
{
A
I1
,
A
I2
}
AI
1-
A
I2
A
I1
+A
I2
E
AI
AI
2
X
6/
D
I p
ul
se
in
pu
t
C
om
m
un
ic
at
io
n
in
pu
t
P
ID
fe
ed
ba
ck
F
0-
02
+
-
-1
0
1
P
ro
po
rti
on
al
g
ai
n
In
te
gra
tio
n
ga
in
0
1
In
te
gr
at
io
n
se
le
ct
io
n
by
d
ec
ad
e
of
F0
-0
3
D
iff
er
en
tia
l g
ai
n
PI
D
d
iff
er
en
tia
l l
im
it
F0
-1
8
La
st
ti
m
e
In
te
gr
at
io
n
va
lu
e
0
1
P
ID
o
ut
pu
t l
im
it
Fi
lte
rin
g
tim
e
of
P
ID
o
ut
pu
t
F0
-0
7
La
st
ti
m
e
P
ID
o
ut
pu
t
0
1
P
ID
pa
us
ed
O
ut
pu
t v
ol
ta
ge
0
1
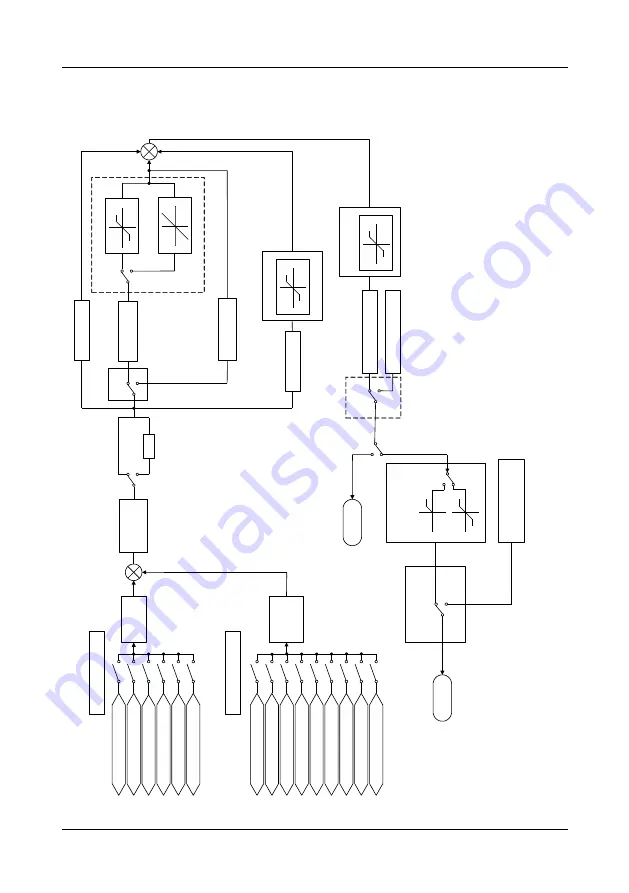
R
el
at
io
ns
hi
p
of
fr
eq
ue
nc
y
di
re
ct
io
n
an
d
ru
n
co
m
m
an
d:
th
e
un
it
of
F0
-0
3
P
ID
in
iti
al
v
al
ue
F
0-
19
0
1
H
ol
di
ng
ti
m
e
of
P
ID
in
iti
al
va
lu
e
0:
no
t a
tta
in
ed
1:
a
tta
in
ed
O
ut
pu
t
fre
qu
en
cy
+
+
+
Fi
lte
rin
g
tim
e
of
P
ID
fd
ba
ck
F
0-
06
P
ro
po
rti
on
al
g
ai
n,
in
te
gr
at
io
n
ga
in
, d
iff
er
en
tia
l g
ai
n
de
ci
de
d
by
F
0-
08
~F
0-
13
.
P
ID
in
te
gr
at
io
n
pa
us
e
sw
itc
he
d
by
di
gi
ta
l i
np
ut
te
rm
in
al
#
35
P
ID
p
au
se
s
w
itch
ed
b
y
di
gi
ta
l i
np
ut
te
rm
in
al
#
34
PI
D
o
ut
pu
t f
re
qu
en
cy
li
m
it
:
it
is
u
pp
er
li
m
it
fre
qu
en
cy
w
he
n
th
e
di
re
ct
io
n
is
th
e
sa
m
e
w
ith
ru
n
co
m
m
an
d,
w
hi
le
it
is
d
et
er
m
in
ed
b
y
F0
-2
3
w
he
n
th
e
di
re
ct
io
n
is
op
po
si
te
F0
-0
1
di
gi
ta
l s
et
tin
g
X
6/
D
I p
ul
se
in
pu
t
C
om
m
un
ic
at
io
n
in
pu
t
PI
D
s
et
tin
g
F0
-0
0
Fi
lte
rin
g
tim
e
of
P
ID
s
et
tin
g
F0
-0
5
P
ID
o
ffs
et
li
m
it
F0
-1
7
PI
D
P
ID
p
os
iti
ve
a
nd
ne
ga
tiv
e
ad
ju
st
m
en
t
In
te
gr
at
io
n
pa
use
d
Fi
g.
6
-4
8
V
/f
se
pa
ra
te
d
en
ab
le
d







































































