


























Chapter 6 Specification of Parameters
GK600 User Manual
- 206 -
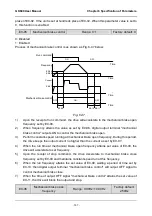
Process PID is provided with two groups of proportion, integral and differential parameters set
by F0-14. F0-08~F0-10 are the first group of parameters.
Proportional gain Kp: dynamic response of the system can be quickened by increasing
proportional gain Kp. However, excessive Kp value would bring about system oscillation. Only
proportional gain control cannot eliminate steady state error.
Integration time: dynamic response of the system can be quickened by reducing integration
time Ti. However, excessively small Ti value would result in serious system overshooting and
may easily bring about oscillation. Integral control can be used to eliminate steady state error
but is unable to control sharp changes.
Differential time Td: it can predict the change trend of offset and thus can rapidly respond to the
change, improving dynamic performance. However, this is vulnerable to interference. Please
use differential control with caution.
F0-11
Proportional gain Kp2
Range: 0.0~100.0
Factory default:
50.0
F0-12
Integration time Ti2
Range: 0.0s~100.0s
Factory default:
0.5s
F0-13
Derivative time Td2
Range: 0.000s~50.000s
Factory default:
0.000s
Process PID is provided with two groups of proportion, integral and differential parameters set
by F0-14. F0-11~ F0-13 are the second group of parameters.
F0-14
PID parameter switchover
Range: 0~2
Factory default: 0
Process PID is provided with two groups of proportional, integral and differential parameters,
which is set by this parameter.
0: No switch, determined by parameters Kp1, Ti1 and Td1
Always determined by Kp1, Ti1 and Td1 set at F0-08~F0-10.
1: Auto switched on the basis of input offset
When the offset between setting and feedback is less than the set value of F0-15, PID
adjustment is determined by Kp1, Ti1 and Td1. When the offset between setting and
feedback is bigger than the set value of F0-15, PID adjustment is determined by Kp2, Ti2 and
Td2 set at F0-11~F0-13.
2: Switched by terminal
When digital input terminal "PID parameters switch" is OFF, it is determined by Kp1, Ti1 and
Td1. When "PID parameters switch" is ON, it is determined by Kp2, Ti2 and Td2
F0-15
Input offset under
PID auto switch
Range: 0.0%~100.0%
Factory default:
20.0%







































































