


























GK600 User Manual Chapter 6 Specification of Parameters
-
207 -
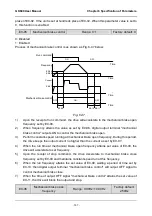
When F0-14 is set to 1, this parameter sets the switching point of the two groups of PID
parameters. When the offset between setting and feedback is less than this set value, it is
determined by Kp1, Ti1 and Td1. When the offset between setting and feedback is bigger than
this set value, it is determined by Kp2, Ti2 and Td2.
F0-16
Sampling period T
Range: 0.001s~50.000s
Factory default:
0.002s
Sampling period aims at feedback. PID controller performs the sampling and compute once in
each sampling period. The longer the sampling period T is, the slower the response time will
be.
F0-17
PID offset limit
Range: 0.0%~100.0%
Factory default:
0.0%
If the offset between PID feedback and setting is more than this set value, PID regulator will
implement regulation. If the offset between PID feedback and setting is less than this set value,
PID will stop the regulation and the PID controller output will be kept unchanged. This function
can improve the stability of PID performance.
F0-18
PID derivative limit
Range: 0.0%~100.0%
Factory default:
0.5%
Sets differential output limit of PID control.
F0-19
PID initial value
Range: 0.0%~100.0%
Factory default:
0.0%
F0-20
PID initial value holding
time
Range: 0.0s~3600.0s
Factory default:
0.0s
PID does not make adjustment when the drive starts its running, but outputs the value set by
F0-19 and maintains the holding time set by F0-20, then starts PID adjustment. When F0-20 is
set to 0, PID initial value is disabled. This function makes PID adjustment get into stable status
fast.
F0-21
PID feedback loss
detection value
Range: 0.0%~100.0%
Factory default:
0.0%
F0-22
PID feedback loss
detection time
Range: 0.0s~30.0s
Factory default:
1.0s
When offset between feedback and setting of PID is bigger than set value of F0-21 and the
lasting time attains the set time of F0-22, the drive reports fault "Plo". If F0-22 is set to 0,
feedback loss detection is disabled.







































































