





























SYSTEM/DISPLAY CONFIGURATION
79
Filter Setting
Digital Filter Overview
Filter basics
The GDM-8261A’s internal digital filter converts the
analog input signal into digital format before passing it to
internal circuits for processing. The filter affects the
amount of noise included in the measurement result.
Filter type
The digital filter averages a specific number of input
signal samples to generate one reading. The filter type
defines the averaging method. The following diagrams
highlight the differences between the Moving and
Repeating filter using 4 samples per reading.
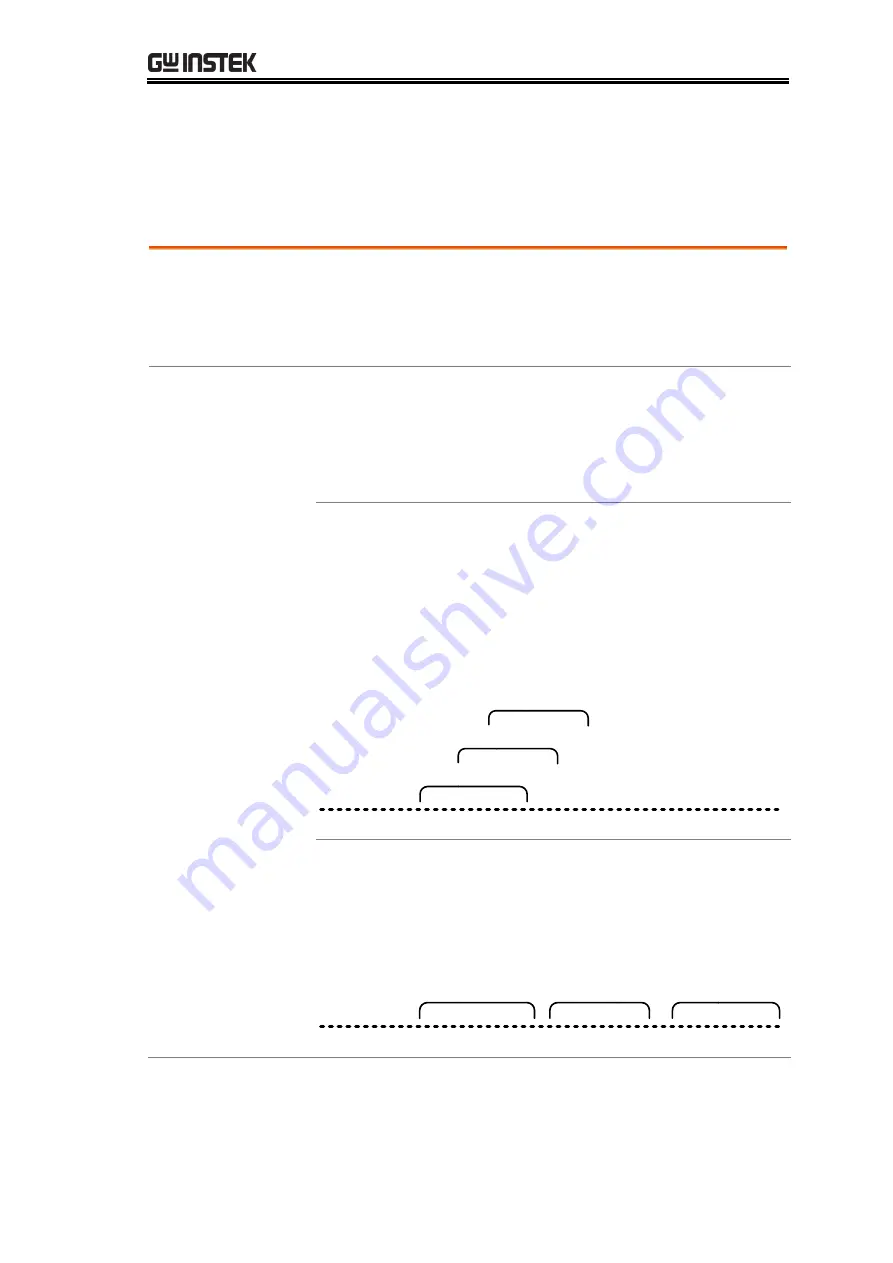
Moving
(default)
The Moving filter takes in one new
sample and discards the oldest sample
per reading. This is the default behavior
when the digital filter is not specified,
and is recommended for most
applications except for the optional
scanner operation (page 103).
1
Sample #
1st reading Sample 1 - 4
2nd reading Sample 2 - 5
3
2
4
5
6
7
8
9
10 11 12
3rd reading Sample 3 - 6
Repeating
The Repeating filter renews a whole
group of samples per reading. This
method is recommended when using
the optional scanner (page 103).
1
Sample #
1st reading
Sample 1 - 4
2nd reading
Sample 5 - 8
3
2
4
5
6
7
8
9
10 11 12
3rd reading
Sample 9 - 12







































































