





























HAKUBA 26PPM Laser Printer - Base Engine Technical Manual
13-71
Version 1.0
Principles of Operation
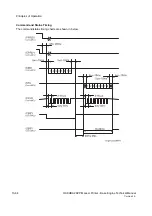
ROS Control
Warm-up
The ROS completes warm-up when the SOS signal intervals are shorter than the READY reference value,
during three consecutive samplings of the SOS signal interval, and when the actual LD laser power
reaches the value that was set in Configuration Code 2. The READY interval for the SOS signal is approx-
imately 98% of the SOS interval when the ROS Motor is rotating at the rated speed of 277.41 s for 600
dpi and 138.71 s for 1200 dpi.
ROS Motor and LD Control in Various Printer Modes
Printable Area
Printer Mode
ROS Motor and LD Control
On-line Mode
The ROS Motor and the LD are both controlled by the
Printer Controller.
Printing Test Mode
The ROS Motor is stopped. The LD is switched on only
when SOS is detected
Diagnostic Mode
The ROS Motor and the LD are always on.
Configuration Mode
The ROS Motor is always on. The LD is switched on
only when SOS is detected.
Summary of Contents for b 6100
Page 1: ...HAKUBA 26PPM Laser Printer Base Engine Technical Manual Version 1 0...
Page 8: ...viii HAKUBA 26PPM Laser Printer Base Engine Technical Manual Version 1 0 Blank Page...
Page 124: ...8 2 HAKUBA 26PPM Laser Printer Base Engine Technical Manual Version 1 0 Diagnostic Mode...
Page 146: ...8 24 HAKUBA 26PPM Laser Printer Base Engine Technical Manual Version 1 0 Diagnostic Mode...
Page 148: ...9 2 HAKUBA 26PPM Laser Printer Base Engine Technical Manual Version 1 0 Adjustment Mode...
Page 152: ...9 6 HAKUBA 26PPM Laser Printer Base Engine Technical Manual Version 1 0 Adjustment Mode...
Page 396: ...12 26 Hakuba 26PPM Laser Printer Base Engine Technical Manual Version 1 0 Parts List...







































































