




















Instruction Manual PSx3xxSE
16
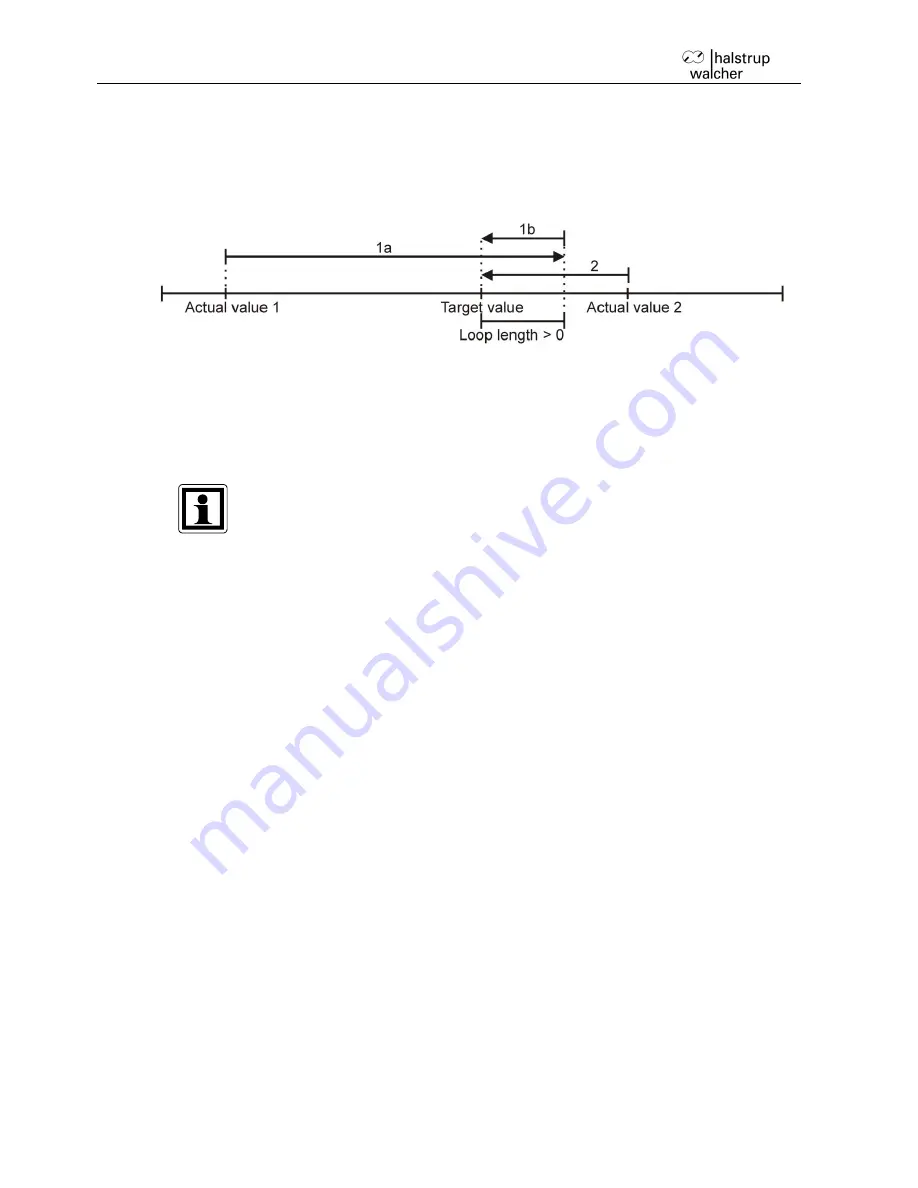
3.1.1 Positioning sequence with loop
The loop length (S-0-0058) has the effect of ensuring that a target value is always approached
from the same direction. This allows you, for example, to eliminate the lash in a driven spindle.
The diagram below illustrates the function of the loop length:
If the target value is above the current position (actual value 1) and the loop length is > 0, the
drive runs past the target value by the specified loop length (run 1a) and then runs to the
target value (run 1b).
If the target value is below the current position and the actual value (actual value 2) is outside
the loop length, the drive approaches the target value directly (run 2).
If you wish to approach the position from the left, the loop length must be < 0.
It is not possible to perform a positioning run to the upper limit (S-0-0049)
with a loop length > 0 because the drive would have to run past the upper
limit in order to do so. The same applies to the lower limit (S-0-0050) with a
loop length < 0.
3.1.2 Positioning sequence without loop
Positioning runs from both directions are possible without a loop if the loop length (S-0-0058)
is set to 0. This does NOT eliminate any lash present in the spindle. The PSx3xxSE internal
gear backlash does not play a role in this case, as position data are acquired directly at the
output shaft.
3.2
Speed, acceleration and delay
The target speed from S-0-0259, acceleration from S-0-0260 and delay from S-0-0359 apply
for all runs. As the drive approaches the target at the end of the run, the delay is successively
reduced in order to ensure a harmonious transient response.
If a stop command is executed, the drive brakes with the maximum possible deceleration
ramp.
3.3
Response if the drive encounters an obstacle or is turned manually
If during a run the achievable rate of speed falls below the threshold parameter (30% of the
target speed) for longer than 200 ms, the instrument registers an obstacle, aborts the run and
a C1D error message is generated (diagnosis code: 0xC00F2055). The drive then stands still
with the set holding torque (S-0-0533). A new run command will only be accepted when the
error has been deleted (see Section 0).
If, when the drive is at a standstill, it is pushed out of the positioning window, the bit 'In
Position' (see Section 2.6.2) will be deleted. If readjustment is active (S-0-0900), the drive will
return to the target value.
Summary of Contents for PS*3**SE series
Page 22: ...Instruction Manual PSx3xxSE 22...
































































